

au sommaire
Tepco (Tokyo Electric Power Company)), l'opérateur de la centrale nucléaire de Fukushima, a annoncé samedi qu'au cours d'une investigation ayant duré trois jours, un robot avait obtenu les premières images de combustiblescombustibles nucléaires ayant fondu dans le réacteur n° 3 depuis la catastrophe du 11 mars 2011 provoquée par un puissant tsunami.
Du moins, la probabilité est élevée que ces dépôts observés soient du combustible fondu mélangé à du métalmétal, a déclaré le porteporte-parole de la compagnie. « D'après les photos prises, il est évident que certains objets fondus sont sortis du réacteur. Cela signifie que quelque chose à haute température a fondu certains objets structurels et est sorti. Il est donc naturel de penser que les barres de combustible fondues sont mélangées avec eux. »
Des extraits de l’exploration de la zone de confinement primaire du réacteur n° 3 par le robot télécommandé, le 21 juillet 2017. © The Japan Times, Courtesy of Irid, YouTube
Il faudra plus de 40 ans pour décontaminer la centrale de Fukushima
Identifier et localiser ces éléments est une étape très importante dans le processus de décontamination du site, de même que leur analyse permettra peut-être de mieux comprendre la chaîne des évènements durant l'accidentaccident. Selon des estimations publiées en décembre 2016 par le ministère de l'Économie, du Commerce et de l'Industrie japonais, le démantèlement de la centrale de Fukushima prendrait plus de 40 ans et coûterait au total 72 milliards de dollars. Et, si on inclut les compensations et la décontamination au démantèlement, l'addition s'élèverait à 192,5 milliards de dollars.
Surnommé « Little Sunfish », le petit robot télécommandé long de 30 cm est équipé de deux caméras. Il n'est pas le premier à s'aventurer dans les eaux radioactives d'un réacteur de la centrale mais les précédentes tentatives ont avorté, soit parce que les éléments restaient difficiles à identifier, soit parce qu'ils étaient inaccessibles.
Des robots pour inspecter la centrale nucléaire de Fukushima
Article de Marc ZaffagniMarc Zaffagni publié le 4 décembre 2012
Pour travailler dans les décombres de la centrale nucléairecentrale nucléaire de Fukushima-Daiichi, détruite par le tsunamitsunami qui a frappé le Japon en mars 2011, des engins spéciaux voient le jour. Toshiba propose un curieux robot quadrupède portant sur son dosdos un petit roverrover et Cyberdine adapte son exosqueletteexosquelette HAL pour protéger des radiations et de la chaleurchaleur.
À la suite du tsunami qui a ravagé le Japon en mars 2011, la centrale nucléaire de Fukushima-Daiichi a subi une explosion sur l'un de ses réacteurs. Plus d'un an et demi après le sinistre, le site reste hautement contaminé et certaines zones sont encore inaccessibles aux interventions humaines. Pour avancer dans les travaux sans risquer des vies, l'alternative consiste à utiliser des robots. Toshiba vient de présenter un modèle quadrupède capable d'évoluer sur des terrains accidentés, de monter des escaliersescaliers et d'éviter les obstacles jonchant le sol. Il est équipé d'une caméra et d'un dosimètre pour mesurer le niveau de radiation environnant.

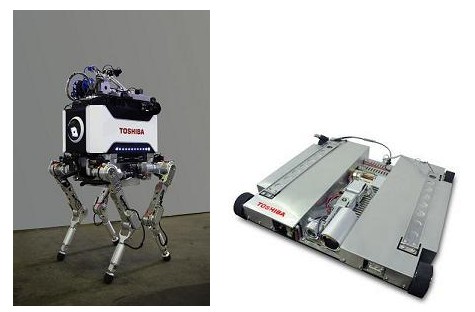
À gauche, le robot quadrupède conçu par Toshiba pour se déplacer dans les zones irradiées de la centrale nucléaire de Fukushima-Daiichi. Il est piloté à distance par une liaison sans fil. À droite, le minirobot d’exploration, qui peut être déployé par le modèle quadrupède dans les zones les plus inaccessibles. Les deux robots communiquent grâce à une liaison par câble. © Toshiba
Contrôlé par une connexion sans fil, ce robot pourra se rendre dans les zones les plus fortement contaminées. Et s'il se trouve bloqué dans sa progression, il peut lâcher... un robot, qu'il transporte sur son dos. Doté de 4 roues et d'une caméra, ce compagnon est relié au robot principal par un câble. Il pourra, par exemple, inspecter l'état d'une tuyauterie ou des installations situées dans des zones étroites difficiles d'accès.
Le robot quadrupède pèse 65 kgkg pour un peu plus d'1 m de haut. Il se déplace à 1 km/h et possède une autonomie de deux heures. Le minirobot d'inspection pèse quant à lui 2 kg, pour 313 mm par 327 mm par 47 mm, avec une autonomie d'une heure et une vitessevitesse de déplacement de 200 m/h. Toshiba indique dans son communiqué qu'il compte poursuivre le développement de son robot, notamment en ajoutant un bouclier antiradiation et en le rendant étanche.
Un exosquelette avec du tungstène pour explorer Fukushima
Les interventions humaines restent malgré tout indispensables à la centrale de Fukushima-Daiichi. Afin de protéger les personnes et les soulager dans leurs tâches pénibles, l'une des solutions adoptées est le recours à un exosquelette. Cyberdyne, une société créée par le professeur Sankai de l'université de Tsukuba, a développé une version spéciale de son exosquelette Hybrid Assistive Limb (HAL) destiné aux équipes ayant à évoluer dans des conditions dangereuses.
Le robot quadrupède de Toshiba en action, capable de gravir des marches avec une inclinaison prononcée. Lorsque le terrain ne lui permet plus de progresser, il peut déployer le minirobot qui se trouve sur son dos à l’aide d’un bras motorisé. Le minirobot peut par exemple s’engouffrer dans un passage étroit ou un tuyau, en renvoyant les images avec sa caméra embarquée. © Toshiba
HAL utilise des capteurscapteurs placés sur la peau qui détectent les signaux électriques envoyés par le cerveaucerveau aux muscles et permettent au système de se synchroniser avec les mouvementsmouvements des bras et des jambes. Résultat : HAL permet de soulever jusqu'à 40 kg sans forcer. L'exosquelette intègre des coques de protection en tungstènetungstène afin de réduire de moitié l'exposition aux radiations, un système de refroidissement pour l'utilisateur et des capteurs qui mesurent le rythme cardiaque et la température. De quoi prêter main forte aux équipes sur place.










 ont été mis en service entre 1986 et 1992. © Gilles FRANCOIS, Flickr, CC by 2.0")

 a été exploitée de 1968 à 1985. La quasi totalité de la radioactivité présente sur site (combustible et eau lourde) était évacuée dès 1992. La fin des opérations de démantèlement est prévue pour 2025. © Perline, Wikipedia, CC by-sa 3.0")







")


