












au sommaire
Face aux inconvénients du mode automatique, on utilise donc très souvent le mode : téléopérer. Le praticien pilote le robotrobot interventionnel à distance, par l'intermédiaire d'une interface électromécanique qui enregistre les déplacements de ses mains pour les imposer aux instruments. La supervision se fait alors grâce à un retour d'informations sous forme d'images. Le robot emblématique de la catégorie est le robot da Vinci de la société Intuitive Surgical.




Le robot da Vinci, de la société Intuitive Surgical. De gauche à droite : la console de commande, le système à quatre bras s’installant au-dessus du patient, la colonne d’endoscopie avec l’image des instruments à l’intérieur du patient. © Intuitive Surgical
Il est exploité en chirurgiechirurgie laparoscopique, c'est-à-dire qu'une caméra et deux instruments longs, sont insérés dans le patient à travers de petites incisions.
Outre la dextérité distale et l'intuitivité de l'interface et des commandes, ce qui est essentiellement caractéristique de la téléopération est la distance entre l'opérateur et le site opératoire. L'étymologie ne nous contredira pas ! La mise à distance entre le praticien et le patient pour des applications médicales présente principalement deux avantages.
Le robot da Vinci. © Intuitive Surgical/YouTube
Les avantages de la mise à distance
- La voie est ouverte pour les interventions à longue distance (jusqu'à plusieurs milliers de kilomètres, comme l'a démontré l'opération Lindberg en 2001. L'intérêt médical et socio-économique de cette modalité reste cependant à prouver. Les coûts d'infrastructure et d'organisation, ainsi que la nécessité de disposer de deux sites équipés par des appareils compatibles et de connexions sécurisées à très haut débitdébit semblent des obstacles insurmontables si on les met en rapport avec les bénéfices médicaux, lesquels restent mineurs à notre avis ;
- Lorsqu'il est installé dans le poste de pilotage du robot, le praticien bénéficie d'un confort accru par rapport aux interventions conventionnelles pour lesquelles il travaille penché sur le patient, dans une position qui peut être très éprouvante. C'est un avantage indéniable de l'utilisation des systèmes téléopérés, surtout si l'intervention dure longtemps. Dans ce cas, il n'est pas uniquement question de confort du praticien, mais aussi et surtout de qualité du geste pratiqué, tant la fatigue est un facteur de dégradation des performances de manipulation.
Les inconvénients de la mise à distance
Cependant, pour de nombreuses indications, les données anatomiques et médicales permettent un choix des voies d'abord et un positionnement du patient conduisant à des conditions de confort tout à fait satisfaisantes pour une pratique mini-invasive conventionnelle. Pour ces interventions, le gain en confort apporté par la mise à distance du chirurgien est nettement moins critique.
L'introduction d'une distance entre le patient et le chirurgien n'est donc pas toujours d'un grand intérêt fonctionnel. D'aucuns y trouvent même des inconvénients sérieux, le premier d'entre eux étant sans doute la perte de contact physique entre le praticien et « son » patient. De plus, même si la dextérité est conservée, voire supérieure par rapport au geste manuel (comme avec le système da Vinci), la sensation tactile est altérée par le filtrage électromécanique du système, quand elle n'est pas simplement absente. L'augmentation de la distance pose aussi question sur la sécurité des conversions.

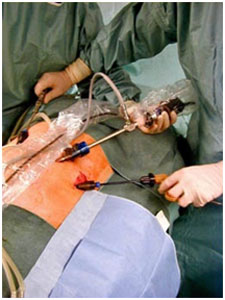
En chirurgie laparoscopique conventionnelle, le chirurgien manipule directement les instruments qui pénètrent à l’intérieur du patient. Il n’est pas tenu à distance. © Département d'urrologie - clinique des franciscaines - Versailles
Enfin, la présence dans le champ opératoire, auprès du patient, reste souhaitable pour de nombreux praticiens, car elle leur permet d'appréhender la situation générale du patient au-delà des organes sur lesquels ils interviennent.
Da Vinci : un système à améliorer
En résumé, si on se considère le système da Vinci comme le système de référence en intervention téléopérée, les avantages indéniables qu'il apporte ne sont finalement pas dans la mise à distance mais dans les autres fonctions : ergonomie et dextérité. La mise à distance est, le plus souvent, le prix à payer. On peut parier que si on donnait à un chirurgien la possibilité d'être au contact de son patient, dans la configuration opératoire à laquelle il est habitué lorsqu'il intervient sans robot, mais avec les mêmes capacités interventionnelles augmentées que procure le da Vinci, il choisirait cette option dans de nombreux cas.
C'est dans ce contexte que les dispositifs de comanipulation que nous avons présentés dans la première partie trouvent leur intérêt : ils préservent la colocalisation du chirurgien et du patient, lesquels contribuent simultanément à la réalisation du geste.













