
















au sommaire
Les travaux dans le domaine de la bionique connaissent des avancées considérables au fil des ans. Partis d'un processus de répétition programmée, les robotsrobots sont aujourd'hui capables d'apprendre seuls et même d'imiter le processus évolutionniste.




Quand les robots apprennent
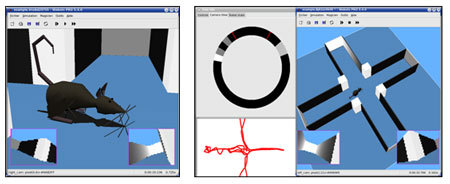
Des enregistrements neurophysiologiques ont montré que les neuronesneurones des circuits dits « dopaminergiques » des MammifèresMammifères s'activent comme s'ils rendaient compte d'une erreur sur la prédiction de l'attribution d'une récompense. Le fonctionnement de ce type de neurones a largement inspiré l'architecture de contrôle d'un Psikharpax virtuel qui a réussi la tâche du labyrinthe en croix, après des essais aussi laborieux - mais finalement aussi efficaces - que ceux que l'on peut observer chez des rats réels.
 et le processus d'apprentissage. © Mehdi Khamassi, Benoît Girard, AnimatLab, LIP6 & ISIR")
De nombreux travaux portent sur l'apprentissage par imitation chez les robots, notamment ceux de l'école polytechnique de Lausanne. La poupée Robota, par exemple, est équipée de capteurscapteurs visuels et auditifs. Sa bouche peut remuer, ses bras sont articulés, ses mains préhensilespréhensiles. Elle est capable d'imiter des gestes simples accomplis devant elle par un humain et est également capable de mettre en correspondance des sons entendus et la façon qu'elle aura de les prononcer. Outre sa contribution à la progression des connaissances sur l'apprentissage par imitation chez les systèmes artificiels, la poupée Robota est impliquée dans le programme d'éducation pour enfants autistes AuRoRaAuRoRa (Autonomous mobile RobotAutonomous mobile Robot as a Remedial tool for Autistic children).


Les robots se développent
Livré à lui-même sur un tapis d'éveil pour bébé, Aibo explore les conséquences sensorimotrices des différentes actions qu'il peut effectuer, comme bouger sa patte, ouvrir sa gueule, donner un coup dans un objet suspendu, japper, etc. À chaque fois, l'action choisie est celle qui optimise son apprentissage. Comme un bébé, il s'intéresse un temps à un certain comportement, qu'il reproduit plusieurs fois de suite, pour l'abandonner soudain et passer à un autre. Il élabore ainsi lentement lui-même son répertoire moteur et apprend qu'un objet suspendu peut se balancer d'un coup de patte ou qu'il peut être mordillé, que japper lors de l'entrée d'un expérimentateur entraîne... un jappement de celui-ci - un choix délibéré des chercheurs pour communiquer avec leur robot.


Le processus évolutionniste chez les robots
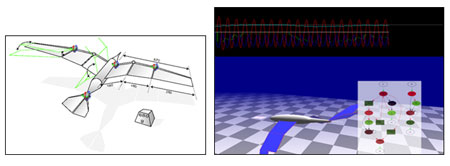
La bionique s'intéresse aux robots-chienschiens, mais aussi aux robots volants. Dans l'état actuel des connaissances, personne ne sait exactement quel type de contrôle utiliser pour un robot à ailes battantes, ni quelle forme idéale donner aux ailes, ni quels degrés de liberté leur associer pour que ce robot vole efficacement. C'est pourquoi il est avantageux de laisser un processus évolutionniste ajuster lui-même ces caractéristiques. Par évolution, l'oiseauoiseau artificiel Robur va contrôler les mouvements des panneaux de ses ailes pour voler efficacement.

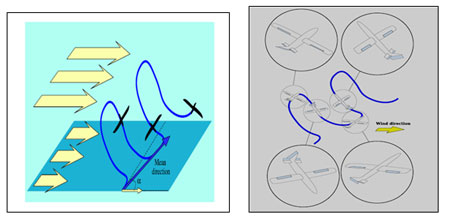
Bien que ces méthodes parviennent à trouver comment battre des ailes en dépensant le moins d'énergie possible, il reste que les oiseaux seraient vite épuisés à utiliser constamment ce mode de locomotion. Aussi ont-ils appris à exploiter le mouvement des masses d'airmasses d'air pour alterner vol battuvol battu et vol planévol plané au-dessus des terres, comme le font les oiseaux de proie. D'autres exploitent les différences de vitesse du ventvent à la surface des océans comme les albatros. Par évolution, un motoplaneur simulé a reproduit la trajectoire caractéristique de cet oiseau.


par Agnès Guillot
Publié le 9 novembre 2008 à 23:00,
modifié le 19 février 2021 à 15:53
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech





 coll. MNHN. Le squelette du guépard révèle un ensemble d’adaptations à la course. Les membres postérieurs sont formés de trois segments de même longueur (correspondant à la cuisse, à la jambe et au pied), ce qui permet d’augmenter la poussée du pied par une extension de grande ampleur. La souplesse de la colonne vertébrale et l’élasticité des ligaments lui permettent d’emmagasiner l’énergie lors de la flexion, pour la restituer lors de l’extension du corps. La course est aussi facilitée par la petite taille de la tête (en comparaison de celle d’un lion, par exemple).Tous droits réservés. Photo issue du livre Évolution. Préface : Jean-Pierre Gasc. Textes : Jean-Baptiste de Panafieu. Photographies : Patrick Gries. © Éditions Xavier Barral, Muséum national d'Histoire naturelle")

, and R. Gendler (for the Hubble Heritage Team) J. GaBany, DP")







