
















Dans le cadre de recherches prospectives, des animatsanimats visent à comprendre comment émergentémergent diverses capacités adaptatives, comme contourner un handicap, savoir se localiser ou apprendre à découvrir le monde.

Comprendre les capacités cognitives
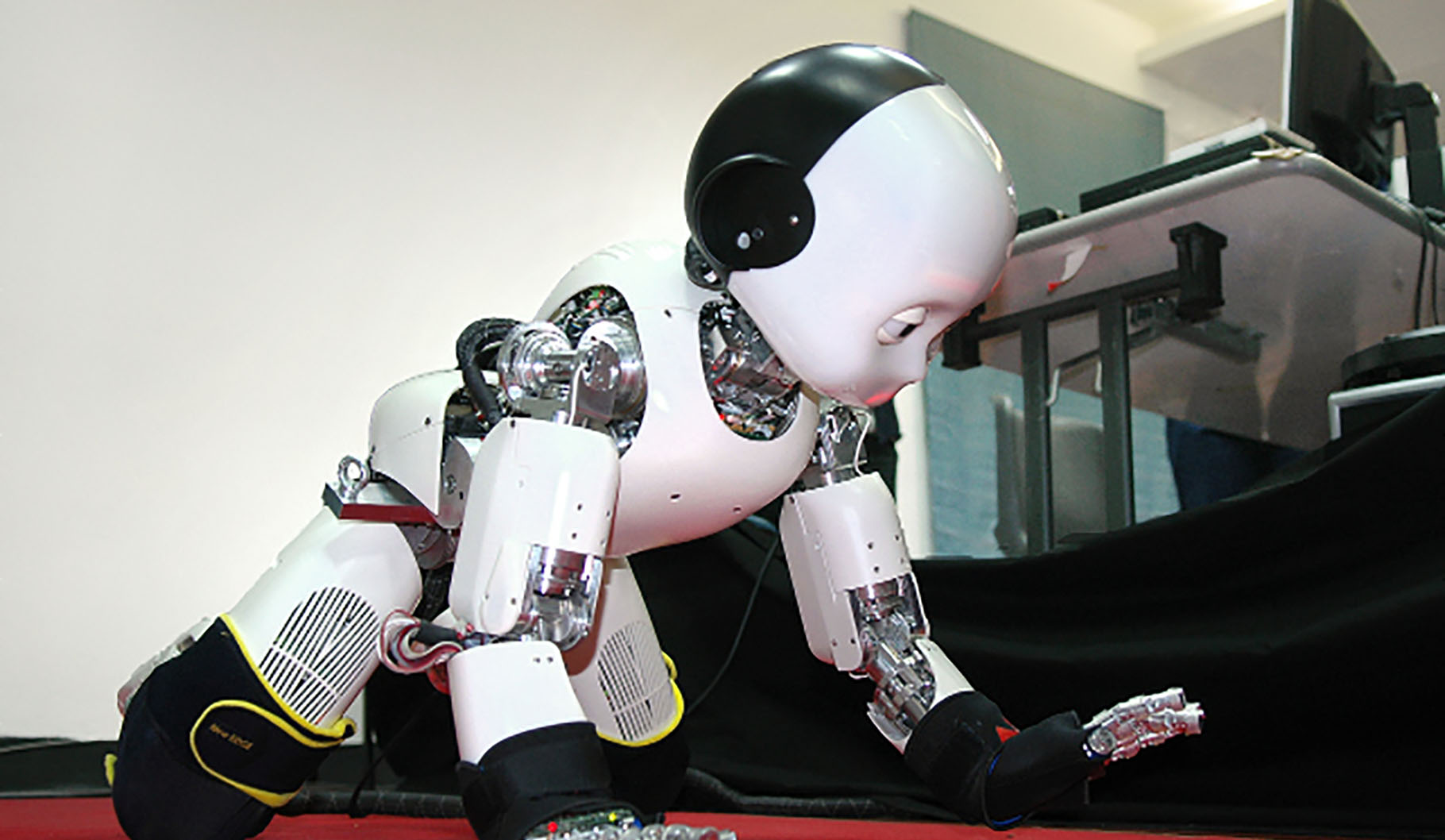
Parmi les nombreux humanoïdeshumanoïdes présents dans les laboratoires et qui n'ont le plus souvent d'humain que leur forme, le seul qui vise à comprendre vraiment comment émergent des capacités cognitives humaines serait le robotrobot-enfant iCub, partagé par une vingtaine de laboratoires.
Il est en train d'apprendre patiemment à découvrir le monde, c'est-à-dire intégrer son image du corps, reconnaître des objets à manipuler, acquérir quelques compétences linguistiques par des apprentissages sociaux et individuels, générer de nouveaux comportements grâce à des expériences passées, voire investiguer la façon dont la coopération humaine peut émerger.
Une notion de la résilience
Alors que les animaux sont résilientsrésilients, c'est-à-dire qu'ils s'accommodent facilement de blessures ou de handicaps (observez le nombre de pigeons dans les villes qui survivent malgré leurs pattes réduites en moignons) les robots sont hors service dès le plus petit incident. Comment les animaux se remettent-ils à se comporter relativement correctement sans avoir effectué très exactement le diagnosticdiagnostic de leur problème ? Une équipe de l'ISIR, puis de l'Inria, a mis au point un système d'apprentissage qui permet à un robot de trouver un nouveau comportement efficace en moins d'une vingtaine d'essais et de deux minutes. L'algorithme a été appliqué à divers ResiBots, dont un insectoïde à qui on a brusquement « cassé » une patte et qui a trouvé tout seul et très rapidement la meilleure façon de résorber ce handicap.



par Agnès Guillot
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech







, révèle la morphologie ultrastructurale des coronavirus. Notez les pointes, des protéines qui ornent la surface externe du virus donnant l'apparence d'une couronne entourant le virion, lorsqu'elles sont vues au microscope électronique. Un nouveau coronavirus, appelé syndrome respiratoire aigu sévère coronavirus 2 (SRAS-CoV-2), a été identifié comme la cause d'une épidémie de maladie respiratoire détectée pour la première fois à Wuhan, en Chine en 2019. La maladie causée par ce virus a été appelée maladie de coronavirus 2019 (Covid-19). © DP, Alissa Eckert, MS ; Dan Higgins, MAMS")









, Nasa")




")
