
















Dans le cadre d'une recherche appliquée, des animatsanimats sont conçus pour trouver de nouveaux moyens d'explorer des zones difficiles, inconnues ou dangereuses.
Dans les mers
Un Octobot, américain celui-ci (Harvard university) ne possède aucun élément rigide. Construit par une imprimante 3D, son corps en siliconesilicone ainsi que ses canaux remplis de « fuelfuel » (peroxyde d'hydrogèneperoxyde d'hydrogène) lui permettent de se déplacer de façon autonome. Cependant le manque de senseurssenseurs l'empêche pour l'instant de répondre aux variations de l'environnement.


Pour explorer les zones côtières, très dangereuses pour cause de turbulences et remous, Robolobster, du Northeastern University et financé par la Darpa, adopte la morphologiemorphologie du homard et la façon dont il contrôle sa locomotion dans ces conditions. De plus, s'inspirant de la sensibilité olfactive exceptionnelle de ces animaux, il vise à une détection sous-marine de mines ou d'objets susceptibles de blesser.


Des chercheurs italiens ont très récemment préconisé la conception de robotsrobots « mous » (avènement de la « soft robotics »), qui auraient l'avantage de ne blesser personne et, surtout, d'être déformables. Leur robot poulpe Octo-bot fait partie d'un programme européen et a été récemment testé en pleine mer. Il peut se propulser de façon autonome et se faufile facilement entre les rochers. Avec ses tentacules, il peut aussi manipuler des objets sous l'eau. Les chercheurs projettent même de convertir un tentacule en endoscopeendoscope ou en... corde vocalecorde vocale.


Dans les airs
Comme son nom l'indique, RoboBee, de l'université d'Harvard, s'inspire de l'abeille et se propulse grâce à un carburant qu'il fabrique lui-même par un système d'électrolyse. Il peut même plonger puis sortir de l'eau pour s'envoler de nouveau. Mille fois plus léger que tous ses prédécesseurs, cette qualité peut devenir un défaut car il a encore du mal à se maintenir dans les courants d'air et les turbulences. Une application - à très long terme - pourrait être de pallier l'absence des insectesinsectes dans la pollinisation des amandiersamandiers de Californie.

Scamp, de Stanford, est plus gros mais plus stable. Ce mini-drone inspiré du moustiquemoustique vole, bien sûr et, contrairement à la majorité des drones, il est capable de se percher et de se poser sur un murmur pour y grimper.
Dans les terres
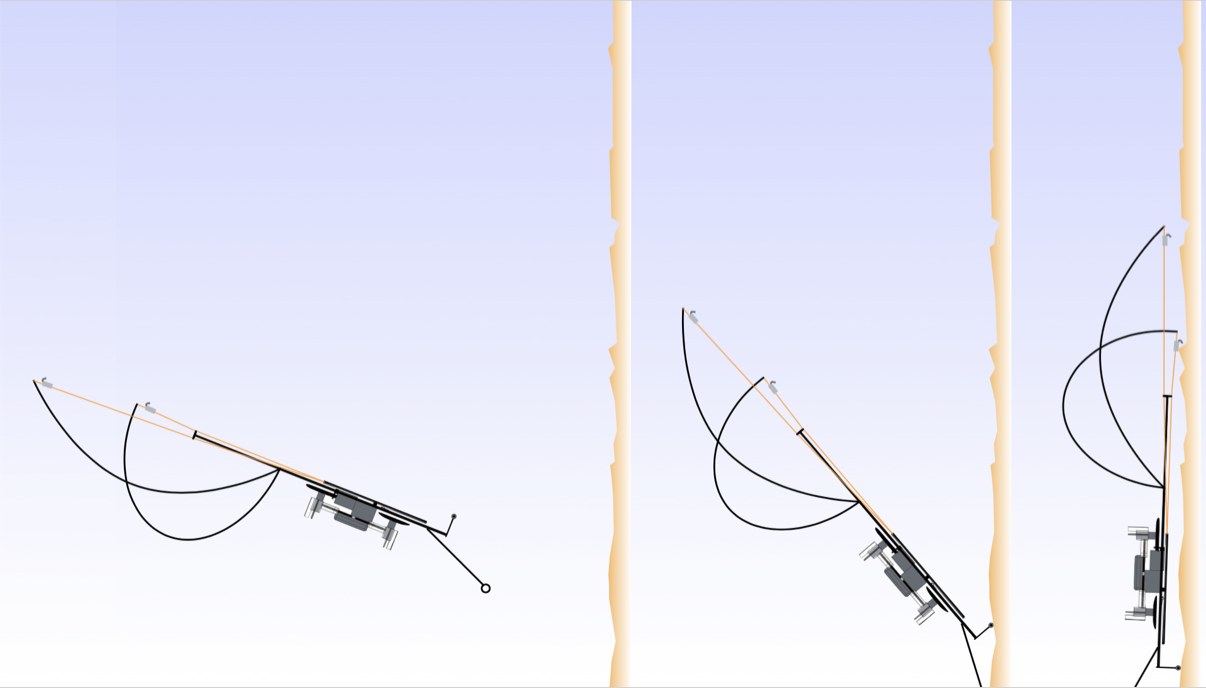
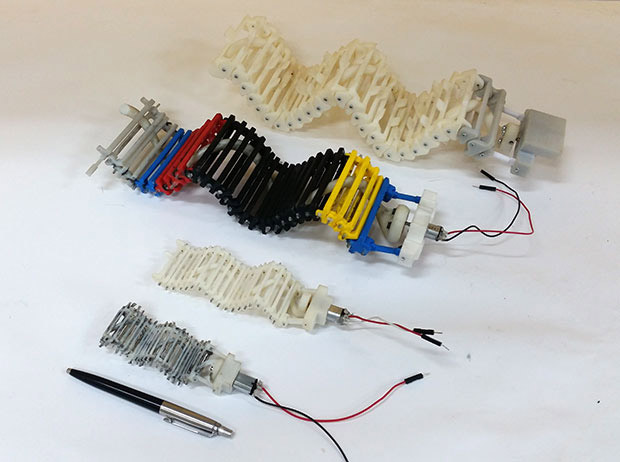
Saw, de l'université israëlienne Ben-Gourion, est capable de ramper comme un ver grâce à un seul moteur. Il se déplace de 57 centimètres par seconde sur n'importe quel sol mouvementé. Il a été expérimenté lors du tremblement de terretremblement de terre du Mexique de 2017 mais les chercheurs visent aussi une version miniaturisée pour une application médicale pour des biopsiesbiopsies, par exemple.

Pour prendre (enfin) un exemple parmi les mammifèresmammifères, le robot guépardguépard Cheetah du MIT peut non seulement galoper à environ 16 km/h mais aussi sauter par-dessus des obstacles de près de 45 centimètres qu'on lui présente inopinément. Il est destiné à explorer des milieux dangereux de type Fukushima.
En essaim
Les robots µes s (micro Tugs) de l'université de Stanford ne pèsent que 16,6 grammes, cependant chacun peut tirer 2.000 fois son propre poids, avec leurs pattes recouvertes d'une structure semblable à celle des pattes du geckogecko. Une demi-douzaine robots peuvent tirer une berline de presque deux tonnes ! C'est un exemple de ce qu'on appelle en robotiquerobotique l'« intelligenceintelligence en essaim », inspirée des insectes sociaux, fourmis ou termites. Aucun n'a une vue globale de la tâche mais, à plusieurs, celle-ci est réalisée. Cette forme de robotique se révèle particulièrement intéressante par sa robustesse car, si l'un des robots est détérioré, la tâche ne sera pas systématiquement interrompue.


Un autre exemple est illustré par le projet européen Cocoro (COllective COgnitionCOgnition RObots) conçoit de multiples petits robots autonomes qui se conduisent comme des bancs de poissonspoissons. Ils peuvent, en communiquant entre eux, trouver des objets sous-marinssous-marins ou détecter des pollutions marines.


Certains d'entre eux sont actuellement en mission dans les lagunes de Venise afin d'analyser les perturbations liées aux bateaux et aux touristes.

par Agnès Guillot
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech








, révèle la morphologie ultrastructurale des coronavirus. Notez les pointes, des protéines qui ornent la surface externe du virus donnant l'apparence d'une couronne entourant le virion, lorsqu'elles sont vues au microscope électronique. Un nouveau coronavirus, appelé syndrome respiratoire aigu sévère coronavirus 2 (SRAS-CoV-2), a été identifié comme la cause d'une épidémie de maladie respiratoire détectée pour la première fois à Wuhan, en Chine en 2019. La maladie causée par ce virus a été appelée maladie de coronavirus 2019 (Covid-19). © DP, Alissa Eckert, MS ; Dan Higgins, MAMS")






