
















Les systèmes hybrideshybrides (mêlant le vivant à l'artificiel) peuvent se réaliser sous une forme moins connue : l'utilisation de prothèsesprothèses biologiques sur des robotsrobots.


Le robot contrôlé par une moisissure
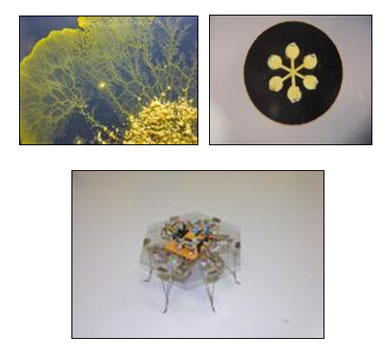
Physarum polycephalum est une sorte de moisissure qui peut capter une source de lumière et s'en éloigner pour la fuir. C'est cette propriété qui va être exploitée pour contrôler un robot. Une équipe de chercheurs japonais et anglais a réussi à faire croître sur un support physique un circuit en étoile. Ce circuit est connecté à un robot à six pattes équipé de six détecteurs de lumière, chacun d'eux étant en contact avec l'une des extrémités des branches du circuit organique. Ainsi, lorsque les capteurscapteurs du robot détectent une source lumineuse dans une certaine direction, les oscillations de Physarum sont traduites en un pattern moteur faisant bouger les pattes de façon à ce que le robot s'éloigne de la lumière.
Les avantages d'un tel montage sont nombreux. La structure de contrôle correspondante est en effet capable de s'auto-organiser, de s'autoréparer, de fonctionner pendant plusieurs jours sans être alimentée, maintenue longtemps à sec dans un état dormantdormant puis être réactivée par humidification.

Ecobot-II et ses bactéries
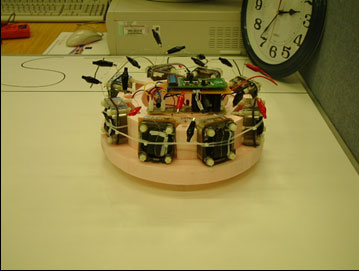
Ecobot-II, un robot développé à Bristol, est équipé d'un système digestif « vivant » constitué d'une série de huit piles à combustible microbiennes hébergeant des bactériesbactéries prélevées dans la boue d'une station d'épuration voisine. Ces piles vont générer de l'électricité à partir des mouches dont on l'alimente et permettent au robot, non seulement de se déplacer, mais encore de faire œuvre utile en se dirigeant vers une lumière et en transmettant par radio vers une station déportée des informations sur la température extérieure. Les performances correspondantes sont encore très modestes car il se déplace en moyenne toutes les 15 minutes pendant deux à trois secondes et sur une distance de deux à trois centimètres, avant d'être obligé de s'arrêter pour accumuler l'énergie nécessaire. Toutefois, il peut assurer cinq jours de mission continue en digérant une seule mouche dans chacune de ses piles à combustible.
Dans le futur, le robot pourrait chercher et attraper lui-même les mouches dont il a besoin en s'aidant de pièges odorants ou lumineux appropriés. D'autres sources d'énergie riches en sucresucre, comme des fruits ou des carapaces de crustacés, pourraient également être utilisées.


par Agnès Guillot
Publié le 9 novembre 2008 à 23:00,
modifié le 19 février 2021 à 15:54
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech






. Lorsqu’ils rencontrent une personne, leurs capteurs à ultrason les avertissent. Ils se mettent alors automatiquement en veille.
© Murata")

 - Domaine public")






