









au sommaire
Aujourd'hui, les machines constituent tout un bestiaire : elles empruntent leur mode de déplacement aux arthropodesarthropodes, aux poissonspoissons, aux reptilesreptiles, aux amphibiensamphibiens, aux oiseaux... Alors, les animatsanimats sont-ils la clé du déplacement des robotsrobots ?
Dans la conception des animats, les capteurs d'invention purement humaine, tels les télémètres laser, ont peu à peu été remplacés par des dispositifs inspirés des organes sensoriels des animaux.


Comment se déplacent les robots ? © DrSJS, CCO
Le robot et la vision de la mouche
Par exemple, au sein du laboratoire Mouvement et perception du CNRS, à Marseille, Nicolas Franceschini, Stéphane Viollet et Frank Ruffier équipent des robots volants de systèmes visuels dérivés de l'œilœil à facettes de la mouche. Ces robots utilisent le flux optique, c'est-à-dire la vitesse de défilement de l'image des obstacles sur la rétinerétine, pour éviter ces obstacles et atterrir.


Les particularités de l'œil de mouche intéressent beaucoup les roboticiens. © 1suisse, Flickr, DR
Cette équipe, associée à un consortium européen, a conçu CurvACE (Curved Artificial Compound Eyes), le qualifiant astucieusement de « plus performant capteur visuel au monde ayant seulement 100 millions d'années de retard sur la mouche » ! Il a une vision quasi panoramique horizontale et verticale et calcule le flux optique en temps réel, ce qui le rend, contrairement aux autres systèmes, entièrement fonctionnel en situation de déplacement.
. © Fabien expert, DR")
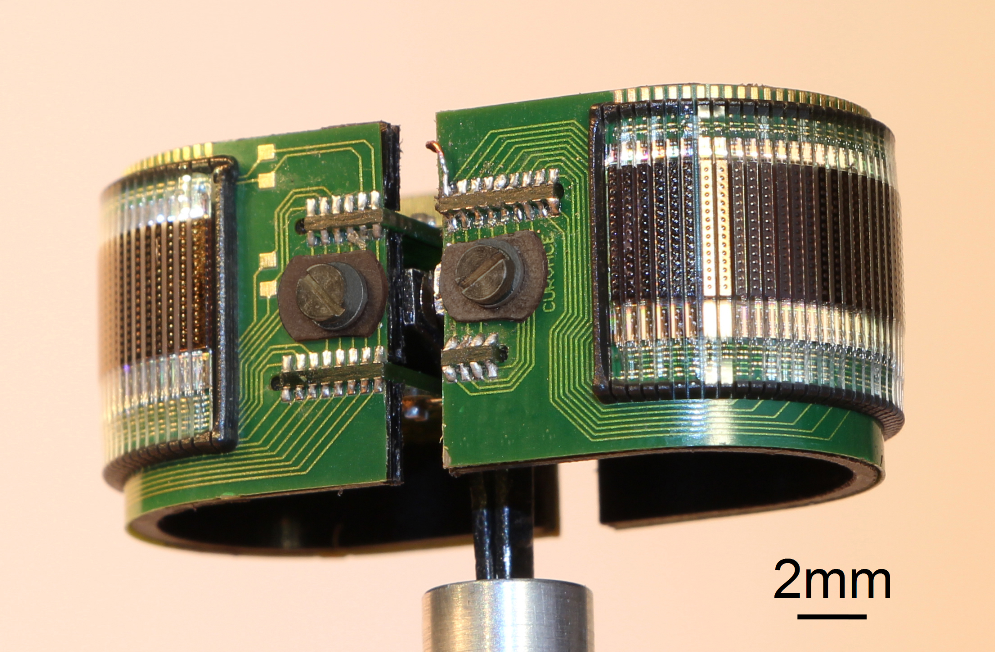
Capteur CurvACE cylindrique (champ de vision : 360 x 60°). © Fabien expert, DR

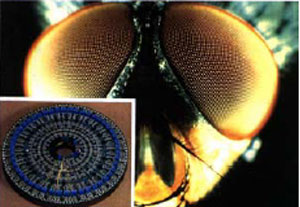
L'œil de mouche artificiel. © N. Franceschini
Le déplacement animal
Les systèmes de locomotion naturels inspirent aussi les roboticiens. Pris parmi d'autres, un robot grimpe aux mursmurs en utilisant de très nombreux microcils adhésifs, à la façon de ceux qui équipent les extrémités des pattes du gecko. Cheetah, le robot guépardguépard du MIT, franchit des obstacles arrivant spontanément devant lui.
Le guépard est le vertébré terrestre le plus rapide au sprint. Des ingénieurs du MIT s'en sont inspirés pour concevoir leur robot. Cheetah peut aller jusqu'à 16 km/h. On est bien loin de la vitesse du félin mais la technique de course ressemble un peu à celle de son modèle vivant. Découvrez en vidéo cette machine qui court et saute avec une précision étonnante. © MIT
Atlas, le robot humanoïde de Boston Dynamics peut exécuter des saltos arrière. Tous ces exemples montrent le type de performances exceptionnelles que peuvent effectuer les robots actuels.

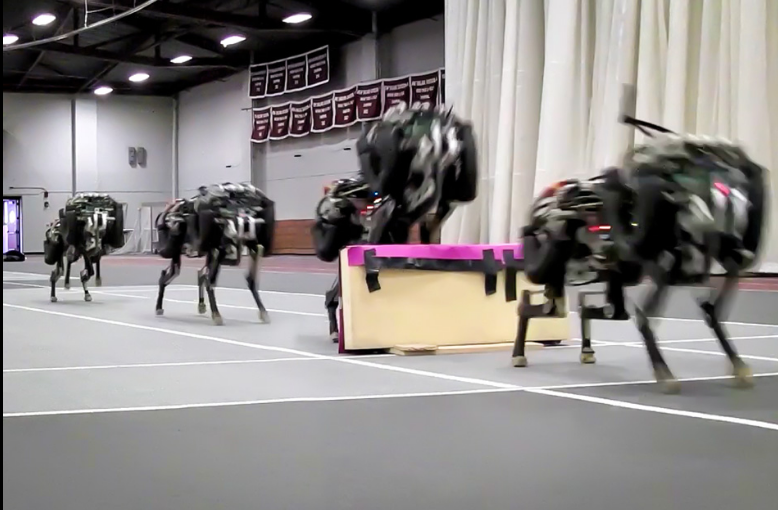
Cheetah, le robot du MIT qui court jusqu'à 16 km/h. © Haewon Park, Patrick Wensing, Sangbae Kim, DR
, un robot langouste, en bas à gauche (<em>Northeastern University's Marine Science Center</em>) et Brachiator, à droite (université de Lagoya). © DR")

Un robot serpent, en haut à gauche (Gavin Miller), un robot langouste, en bas à gauche (Northeastern University's Marine Science Center) et Brachiator, à droite (université de Lagoya). © DR
Le robot rat Psikharpax
Il ne suffit pas à un robot de pouvoir se déplacer, encore faut-il qu'il puisse s'orienter dans un environnement, surtout inconnu des humains (une planète lointaine ou l'appartement d'à côté). Le projet Psikharpax, initié dans notre équipe, a consisté à simuler un « bio-GPSGPS » par la simulation de circuits de neuronesneurones dédiés à la navigation (comme les cellules de lieu, de grille ou de direction de la tête), tels qu'ils ont été découverts chez le rat par des chercheurs ayant eu, depuis, le prix Nobel (en 2014).
En étroite collaboration avec le LPPA d'Alain Berthoz, au Collège de France, expérimentant sur de vrais rats, nos travaux ont permis au robot rat Psikharpax de se construire une représentation spatiale avec ses senseurssenseurs visuels, auditifs, tactiles et vestibulaires. Celui-ci peut aussi choisir entre une navigation « cognitive », grâce à cette « carte mentale » quand le but est caché, ou effectuer une trajectoire plus réactive quand le but est perceptible.

par Agnès Guillot
Publié le 19 janvier 2003 à 23:00,
modifié le 15 février 2018 à 11:26
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech







, d’où partent trois grosses artères : l’artère subclavière gauche, l’artère carotide commune gauche et le tronc brachio-céphalique.© Patrick J. Lynch, CC by-sa 2.5")

")


