









au sommaire
Une fois que le robotrobot peut percevoir le monde (sens visuel, tactile, auditif), qu'il peut décider comment agir et apprendre à agir dans un environnement spécifique, une fois qu'il peut se localiser et construire une carte de soncarte de son environnement, le dernier travail a consisté à intégrer toutes ces fonctions cognitives sur le robot pour lui permettre de naviguer de manière autonome dans l'espace. En quelque sorte, cela a consisté à connecter et faire communiquer les différentes parties de son cerveaucerveau artificiel.

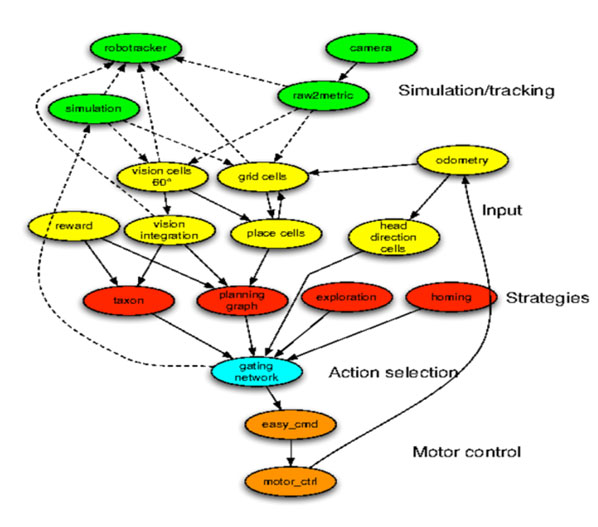
La figure ci-dessus donne une idée de la complexité du schéma d'organisation du « cerveau artificiel » programmé sur le robot Psikharpax : certaines zones ou bouts de programmes correspondant aux modules de traitement de l'information (en jaune sur la figure), directement reliées aux capteurscapteurs du robot (caméra, vibrissesvibrisses, capteurs auditifs, ..), vont contribuer à la perception du robot : quels sont les objets que le robot peut voir ? Est-ce qu'il entend un son et est-il capable de reconnaître de quel type de son il s'agit ? Est-ce que le robot est situé dans un zone ouverte et donc dangereuse ou bien est-il caché contre un murmur qu'il peut ressentir avec ses vibrisses ?

© ISIR/Caluwaerts Ken
La perception de l'environnement
Une sous-partie de ces zones ou modules de perception (toujours en jaune sur la figure) constitue la représentation élaborée du monde qu'est la carte de l'environnement (comme décrit dans le chapitre précédent). Des neurones artificiels vont intégrer toutes les informations perçues par le robot pour en déduire une estimation du lieu dans lequel le robot se situe par rapport au reste de la carte mentale (cellules de lieu ou place cells en anglais sur la figure), et une estimation de l'orientation du robot par rapport à la carte (cellules de direction de la tête, ou head direction cells en anglais).
. © Ken Caluwaerts, Mehdi Khamassi, Steve N’Guyen, Laurent Dollé, Christophe Grand, Agnès Guillot, 2010/ISIR/Caluwaerts Kenrobot Psikharpax")
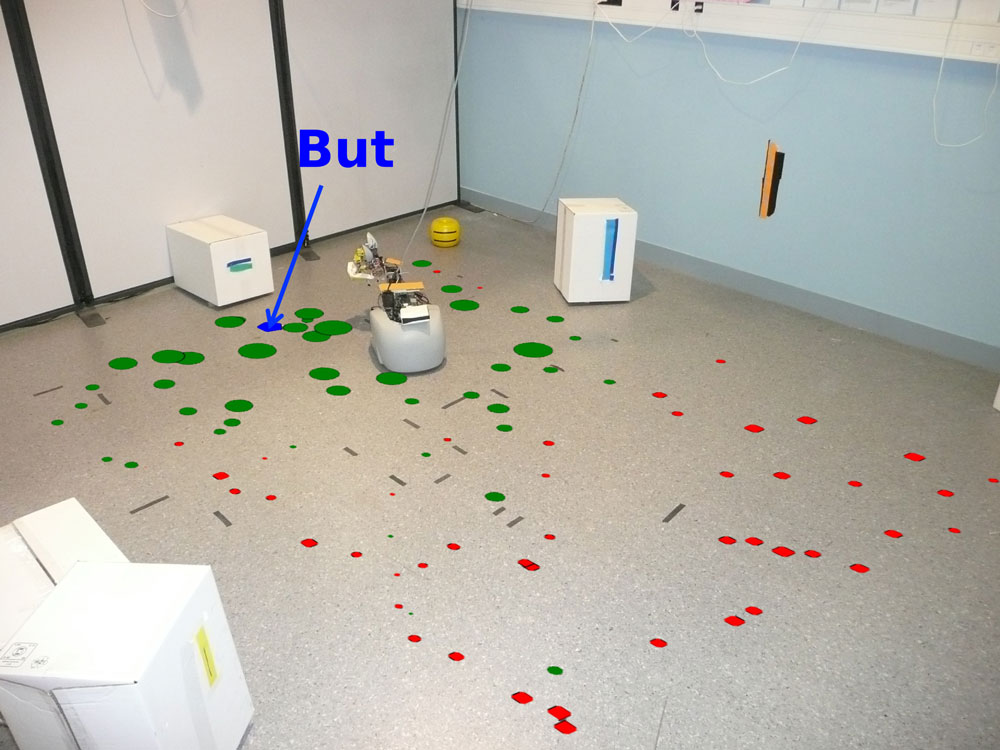
Toutes ces informations permettent au robot d'analyser la situation dans laquelle il se trouve, et quel est l'état de l'environnement autour de lui : tout est calme, ou bien il y a des « prédateurs », ou encore il y a de la « nourriture » présente. À partir de ces informations, une partie du cerveau artificiel du robot va pouvoir prendre des décisions sur le comportement à mettre en œuvre : est-ce qu'il doit fuir ? Est-ce qu'il peut rester au repos ? Est-ce qu'il doit explorer le lieu ? Est-ce qu'il doit s'approcher d'un objet nouveau qu'il perçoit et qui ne figure pas dans sa représentation du lieu ? Est-ce qu'il a besoin de consommer de la nourriture s'il en perçoit ?
Vidéo de l'expérience avec le robot Psikharpax : les différentes stratégies de navigation. © Ken Caluwaerts, Mehdi Khamassi, Steve N’Guyen, Laurent Dollé, Christophe Grand, Agnès Guillot, 2010/ISIR/Caluwaerts Kenrobot Psikharpax/YouTube
Comment le cerveau artificiel gère-t-il la prise de décision ?
Comme dans le cerveau biologique, de façon commune à tous les MammifèresMammifères, ces prises de décision vont dépendre de différents modules du cerveau artificiel du robot. En effet, on sait que chez l'animal comme chez l''humain d'ailleurs, certaines de nos décisions relèvent du réflexe (lorsqu'un objet est propulsé rapidement dans notre direction, on s'écarte brutalement et « sans réfléchir » pour l'éviter). D'autres décisions plus réfléchies et donc plus lentes à mettre en œuvre, dépendantes de motivations diverses, vont être basées sur une estimation des conséquences possibles de l'action avant de l'effectuer.
C'est exactement de cette manière qu'est organisé le cerveau artificiel du robot. Nous allons voir comment son cerveau gère la coordination et la compétition entre deux systèmes de décision, dans le cas de la navigation spatiale (voir encadré). Mais avant cela, on peut voir sur le schéma du cerveau du robot qu'une fois que chaque module rouge a pris une décision, un petit système centralisé va sélectionner un seul comportement à effectuer et va transmettre ce choix sous la forme d'ordres moteurs qui vont actionner les moteurs du robot, l'équivalent des muscles du rat. Comme nous l'avons vu précédemment, ce système de sélection de l'action est inspiré d'une partie du cerveau qui existe chez le rat, mais aussi dans notre cerveau : un ensemble de petits noyaux sous-corticaux appelé les ganglions de la baseganglions de la base.

Les différentes stratégies de navigation
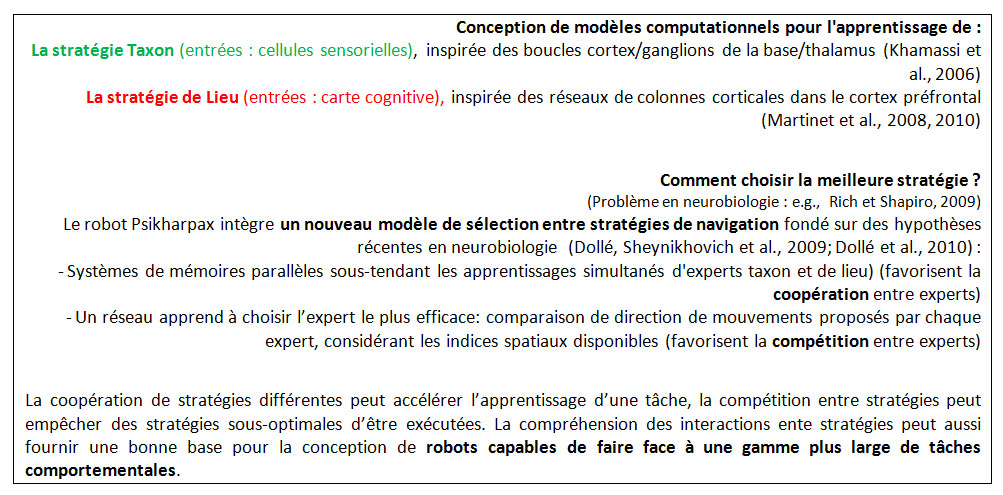
En ce qui concerne les comportements de navigation, les neurobiologistes ont identifiés différentes « stratégies » comportementales qui reposent sur différents types d'information et qui engagent différentes parties de notre cerveau. Une stratégie dite « de lieu » consiste à rechercher dans la carte cognitive le meilleur chemin pour éviter un danger (ou atteindre une récompense précédemment mémorisée) avant son exécution. Une autre stratégie dite « taxontaxon » n'utilise pas la carte cognitive et consiste à atteindre une récompense en utilisant les indices visuels perçus.
L'existence de plusieurs stratégies permet aux animaux d'utiliser la plus adaptée à chaque environnement. Cela permet aussi une économie d'énergie dans les environnements familiers en abandonnant progressivement la stratégie de lieu qui demande beaucoup de calculs à la stratégie taxon, qui permet des comportements plus automatiques et habituels. Ce genre de phénomène existe aussi chez l'Homme. Lorsque l'on se rend à son nouveau lieu de travail dans une nouvelle ville, on regarde une carte et on reste très attentif aux indices de l'environnement en faisant le trajet. Petit à petit, à force d'effectuer le même parcours, l'environnement nous devient plus familier et on peut se déplacer de façon quasi-automatique, tout en rêvant à autre chose, en laissant notre corps nous porter. Un des travers de ce phénomène apparaît lorsque l'on doit aller en un autre lieu qui nécessite qu'on emprunte une partie du chemin habituel, et qu'on se retrouve avec stupeur devant notre lieu de travail à force d'avoir rêvé en marchant.
Quoiqu'il en soit, ce système à stratégies multiples permet aux rats comme à l'ensemble des Mammifères de naviguer de façon très efficace dans leur environnement. Nous avons donc cherché à reproduire les mécanismes cérébraux sous-jacents, et étudié quelle devait être la façon de les coordonner pour permettre au robot de bien naviguer dans son environnement. C'est à nouveau un domaine où la robotiquerobotique peut apporter une contribution aux neurosciences. En effet, les neurobiologistes peuvent identifier certains mécanismes dans différentes parties du cerveau. Mais en l'état actuel des technologies, il leur est pour l'instant très difficile d'identifier les mécanismes d'interaction entre différentes parties du cerveau. Le fait de modéliser informatiquement ces différentes parties sur un robot et de devoir les coordonner pour permettre une navigation efficace nous permet de formuler des hypothèses sur la manière dont ces mécanismes pourraient être coordonnés dans le cerveau du rat. Ce qui crée une nouvelle piste d'échanges entre neurobiologistes et roboticiens...

par Mehdi Khamassi
Publié le 6 mars 2011 à 23:00,
modifié le 11 février 2019 à 15:16
Bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides Télécoms
8 Gb/s pour 23,99€/mois : Bouygues casse les codes avec sa nouvelle B&YOU Pure Fibre

Conso
Guides Tech
Forfaits mobiles à moins de 5€ : lequel choisir avec un petit budget en février 2025 ?

Conso
Guides Tech














