







au sommaire
L'idée d'apprentissage en robotiquerobotique est en lien évident avec ce qu'on observe chez les êtres vivants et c'est ce rapprochement qui est à l'origine de ce qu'on appelle la robotique développementale.


© Courtesy of the RobotCub project


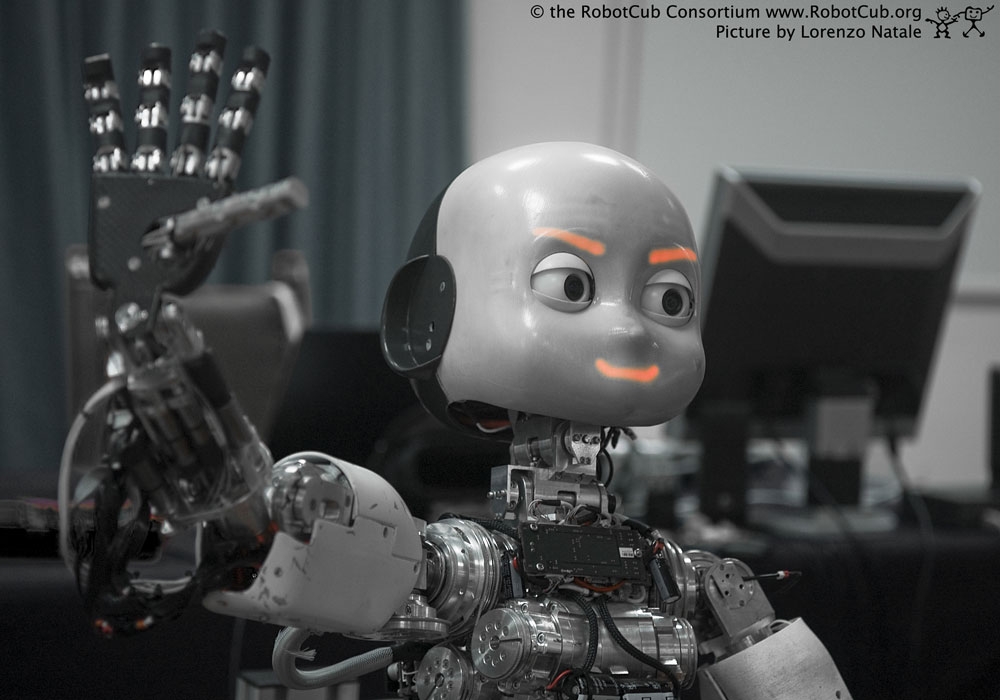
Vues générales du robot iCub. © Courtesy of the RobotCub project
L'idée principale qui se cache derrière ce vocable est celle de l'emprunt aux théories et aux mécanismes connus de la psychologie du développement (notamment chez l'enfant) afin de mettre au point des mécanismes permettant à des robots d'apprendre des savoir-faire nouveaux pour pouvoir interagir dans des environnements physiques et sociaux initialement inconnus et changeants.
Un des projets phares dans ce domaine est le projet européen RobotCub (2005-2010) qui a donné lieu à la conception et à la dissémination du robotrobot iCub.

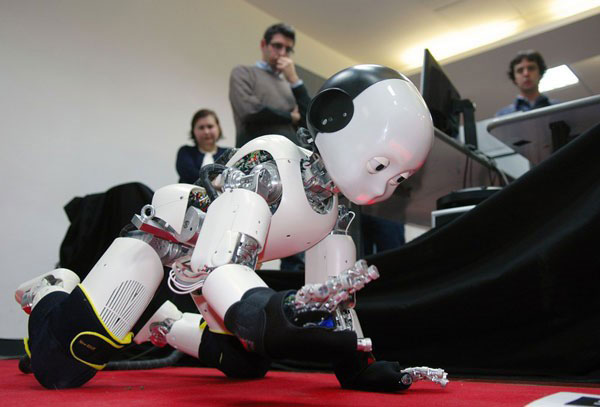
Vues générales du robot iCub. © Courtesy of the RobotCub project
Anatomie de iCub
Ce robot humanoïderobot humanoïde d'1 mètre 04 pour une vingtaine de kilogrammes intègre un grand nombre d'actionneurs (53 en tout : 9 par main, 7 par bras, 6 par jambe, 6 pour la tête et les yeuxyeux et 3 pour le torse) et de capteurscapteurs (codeurs incrémentaux, capteurs d'effort, capteurs tactiles, caméras, centrale inertielle) ainsi qu'un ensemble de ledsleds permettant la génération d'expressions faciales.

Vues générales du robot iCub. © Courtesy of the RobotCub project
D'un point de vue logiciellogiciel, des contrôleurs articulaires locaux permettent le contrôle de chaque articulationarticulation, l'ensemble étant centralisé autour d'une architecture PC104 embarquée dans la tête.

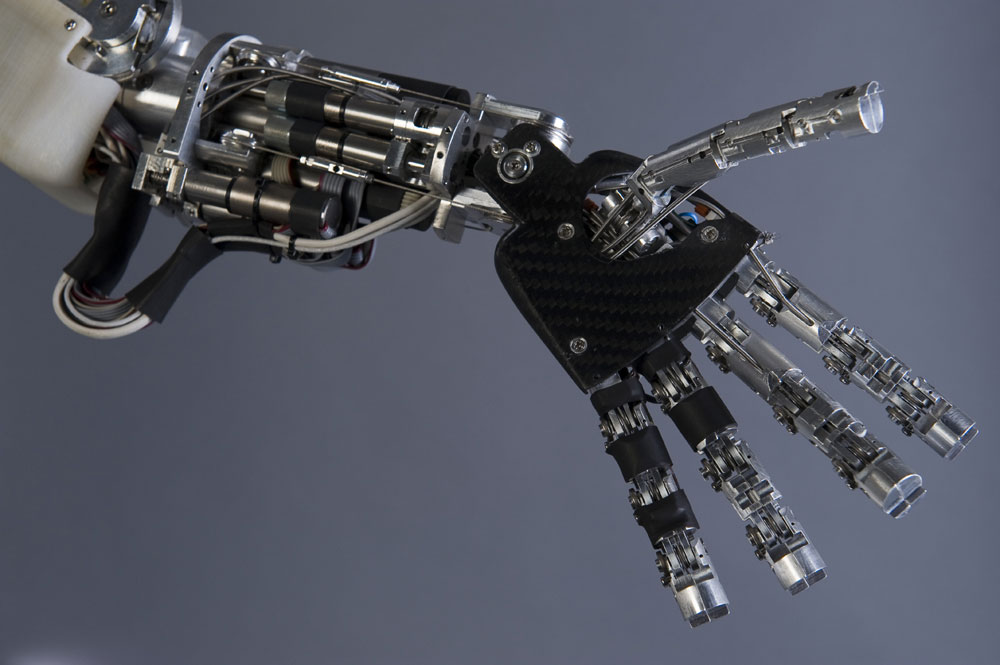
Figure 12 : Vues de détails de certains éléments du robot iCub : contrôleur PC104 embarqué dans la tête, contrôleurs locaux au niveau des jambes, détail de l'avant-bras et de la main gauches, intégration de capteurs tactiles dans la paume de la main. © Courtesy of the RobotCub project

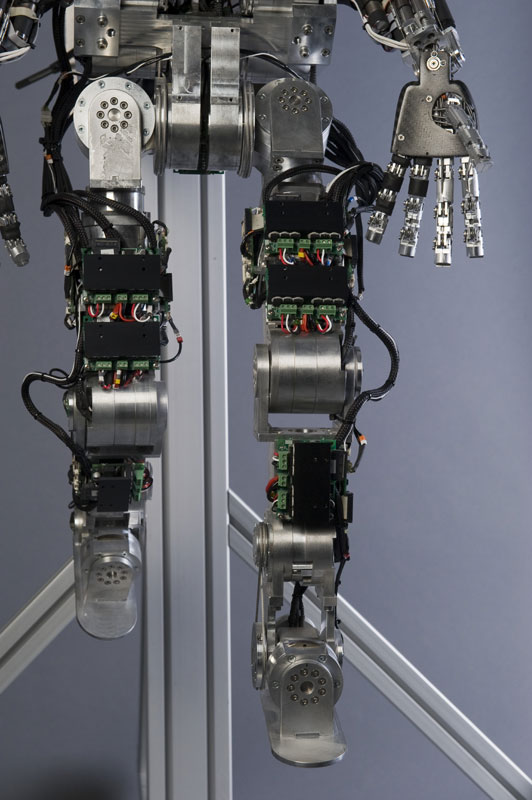
Vues de détails de certains éléments du robot iCub : jambes et haut du tronc. © Courtesy of the RobotCub project











 du 24 au 26 octobre 2017. © Rémy Decourt")

