
au sommaire
La conception d'un robotrobot minisumo permet de réaliser un robot ludique, mais c'est aussi l'occasion de vérifier la validité de ses choix techniques en se mesurant à d'autres lors de rencontres animées mais toujours amicales.
")

Les tournois de robots « minisumo » sont des moments très attendus au Japon et aux États-Unis pour leur caractère futuriste. Depuis 2005, il est possible d'assister ou de participer à ces rencontres, en France.

Le projet « robot minisumo »
Voici quelques éléments permettant de détailler la démarche du projet : approche pédagogique, choix technologiques et stratégies possibles pour espérer sortir vainqueur lors de ces rendez-vous.
À vos outils...
Création d'un robot minisumo : les objectifs pédagogiques
L'aspect pluridisciplinaire est un élément pédagogique important. Outre les parties réalisations mécaniques et électroniques dans la création d'un robot minisumo, il est possible de concevoir une étude de stratégie et même un design ludique. On ne doit pas oublier les aspects logistiques et financiers. C'est un vrai projet industriel avec ses contraintes techniques, mais aussi de temps et d'argent.


Programme pédagogique dans la construction de robots minisumo
Dans une démarche pédagogique, les étudiants ou lycéens sont amenés à découvrir tout ou partie du projet. Suivant le niveau, il est possible de répartir les différentes fonctions par équipe dans une même classe pour réduire la difficulté, ou au contraire, demander un travail complet par binôme.
Au lycée, par exemple, on va traiter l'aspect programmation des fonctions de base avec une découverte des notations binairesbinaires et hexadécimales en classe de seconde. Ces élèves pourront réaliser un robot suiveur de ligne. Puis, en première, on abordera des notions de physique sur l'infrarouge pour faire de la détection d'obstacle. Dans ce cas, les élèves pourront concevoir un robot minisumo. En terminale, on travaillera la partie algorithmiquealgorithmique pour proposer des stratégies d'attaque et de défense.
Pour les étudiants de licence 1, on devra optimiser l'aspect mécanique et électronique et leur demander d'effectuer une structure 3D. Ensuite, en licence 2, il est intéressant de programmer des structures de type intelligence artificielle avec dégradations des performances.
Tous ces projets, outre le fait d'apprendre et de créer, apportent la possibilité de prolonger ses acquis par des améliorations des différentes parties pour les étudiants qui se succèdent sur l'étude.
Moteur et électronique d'un robot
Sans moteur, point de robot. Dans la conception d'un robot minisumo, ou d'une tout autre catégorie, il est primordial de définir son mode de fonctionnement par un choix de moteur adéquat. Il en va de même pour les pneuspneus et l'électronique de commande.

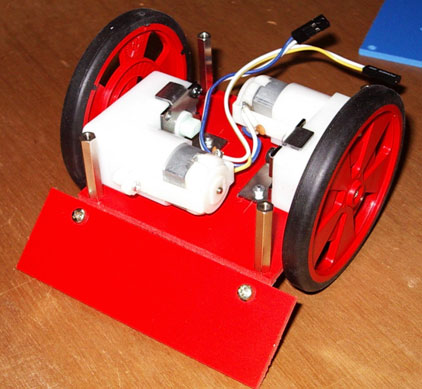
L'importance du moteur dans un minirobot
Le choix des moteurs dépend du niveau de l'équipe. Les débutants utilisent des servomoteurs de modélisme dont ils modifient la mécanique pour obtenir une rotation continue des moteurs ou encore des blocs motoréducteurs adaptés. Les plus expérimentés sélectionnent leurs moteurs et leur système d'engrenages pour optimiser les paramètres comme le couple moteur et la vitesse de rotationvitesse de rotation.
Les pneus
Le choix des pneus est de première importance pour assurer une adhérence optimale. La position du centre de gravité peut être un autre élément favorisant les performances globales du robot.

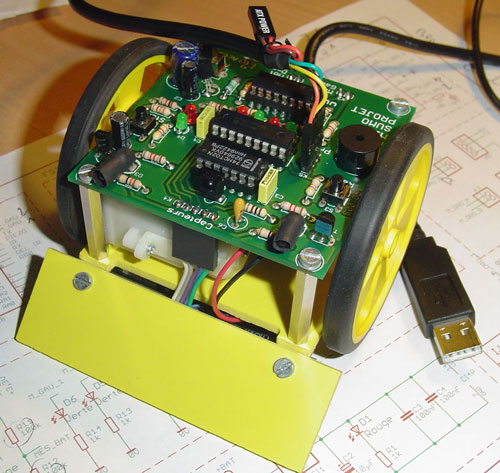
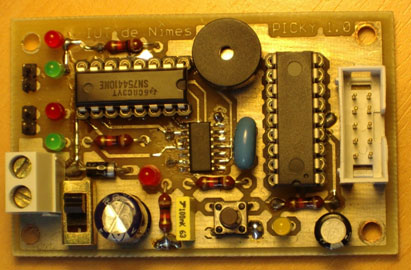
Électronique de commande d'un minirobot mobile
L'électronique de commande des moteurs n'est pas aussi compliquée qu'on l'imagine. La plupart des candidats utilisent le même composant très populaire, un L293D. Ce dernier est très ancien et bien documenté, très facile à mettre en œuvre. Il s'agit d'un double pont en H à transistors bipolaires permettant de piloter les deux moteurs. Il autorise toutes les fantaisies : deux sens de rotation, roue libre, freinage et vitesse variable.
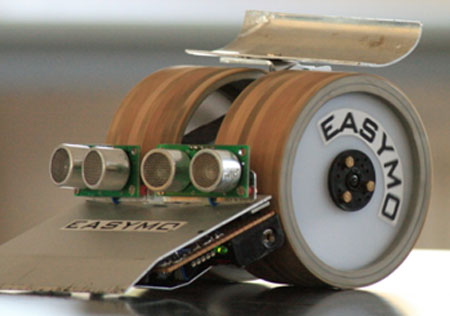
Robotique : les capteurs de détection
Les capteurscapteurs de détection sont primordiaux. Le robot minisumo doit être capable de détecter son adversaire afin de le pousser en dehors du cercle représentant le plateau du jeu. De même, il doit repérer le bord de ce cercle afin de ne pas en sortir lui-même. Plusieurs types de capteurs sont utilisés, suivant s'il s'agit de détecter l'adversaire ou la bordure du cercle.

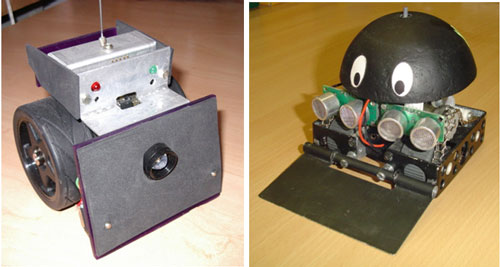
Des capteurs de détection pour contourner l'obstacle
Du plus simple au plus sophistiqué, on trouve des interrupteurs adaptés, des systèmes optiques basés sur les infrarouges, des capteurs de distance basés sur les ultrasons jusqu'à des caméras linéaires.
L'interrupteur est un capteur très simple et facile à mettre en place pour détecter un choc. Mais cette simplicité a un coût, le programme de traitement de cette information peut devenir très lourd. Si on couple ce capteur avec un détecteur d'obstacle sans contact, l'information associée à l'interrupteur va devenir plus simple à traiter, car le capteur d'obstacle sans contact aura, normalement, été sollicité avant.
C'est un peu l'esprit des capteurs que l'on découvre au fur et à mesure qu'on les installe sur les robots pour améliorer leur comportement. Cette évolution dans la complexité liée aux nombres et aux types de capteurs doit être associée aux compétences grandissantes par l'expérience des concepteurs. Ainsi, le robot évolue naturellement en même temps que les connaissances de son « maître ».
Le microcontrôleur pour les robots
La carte électronique, qui contient un microcontrôleur, est une véritable base de contrôle des mouvementsmouvements et déplacements du robot minisumo. L'erreur n'est donc pas de mise lors du choix des technologies à adopter.

Le rôle d'un microcontrôleur
Dans un robot, un microcontrôleur est souvent utilisé comme le cerveaucerveau ou le contrôleur principal du système. Il coordonne et contrôle les différentes parties du robot, telles que les moteurs, les capteurs, les actionneurs et autres composants.
Carte électronique, un microcontrôleur
Le choix d'une technologie plutôt qu'une autre pour le microcontrôleur est souvent dicté par sa propre expérience. Les deux familles qui dominent dans le cadre des robots réalisés par des amateurs sont les PIC et les Atmel. Ces composants programmables à bas coût permettent de répondre à tous les besoins dans le cadre de ses réalisations. Leur puissance de calcul est largement surdimensionnée malgré leur taille, miniaturisation oblige.
Il est possible d'ajouter de nombreux systèmes matériels ou logicielslogiciels pour permettre d'étudier le comportement du robot dans les situations de tests et de combats, comme des indicateurs lumineux de type DelDel, des sons, une liaison sans fil BluetoothBluetooth vers smartphone ou encore une mémoire des événements.
La batterie, l'alimentation du robot
La batterie, dans la réalisation d'un robot minisumo, n'est pas à prendre à la légère. Elle déterminera votre réussite ou échec lors d'un match. L'alimentation est un choix stratégique.


La batterie, alimentation incontournable du robot minisumo
Le choix de la source d'énergieénergie électrique est très varié dans la conception d'un robot minisumo. Le système complet n'est pas très gourmand et il est donc possible de n'utiliser qu'une petite batterie lithiumlithium pour peu que l'on ait fait un choix technologique astucieux. Mais, dans la plupart des cas, il s'agira de 4 à 8 piles rechargeables rondes de type Ni-Mh (de l'anglais nickelnickel-metal hydride, pour nickel-hydrure métallique).
Cependant, le choix est souvent fait par défaut en fonction de la place restante dans le robot, lorsque les dimensions sont imposées, comme c'est le cas pour les tournois de robots minisumo. C'est certainement le point le moins bien étudié de la part des concepteurs débutants. Pour éviter cela, on s'impose souvent de dessiner en 3D la structure. Cette étape va consacrer une place non négligeable au placement de la batterie. Et il arrive, très fréquemment, que cela implique une réorganisation complète du châssis. En effet, si on tient compte du bilan énergétique du robot, la batterie choisie est sans compromis. C'est donc à la structure de lui consacrer la place nécessaire.
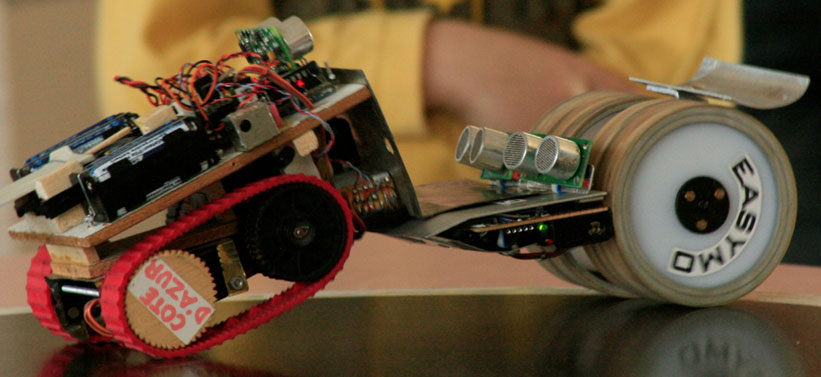
Minirobot : le choix du châssis
Sans être très sophistiqué, le châssis définit le type de stratégie choisie face à l'adversaire, lors de la création d'un robot minisumo.

L'ensemble peut être réalisé en Plexiglas, aluminiumaluminium ou encore en boisbois. Les dimensions sont de 10 cm x 10 cm de côté, sans limitation de hauteur, pour un poids total maximal de 500 g.
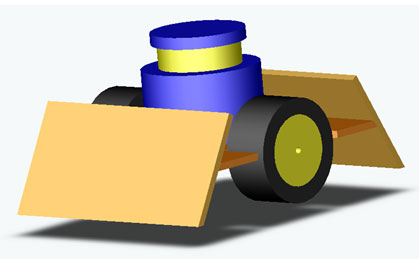
Le châssis, un élément de stratégie pour le robot minisumo
Les premiers châssis personnels sont à l'image de leurs concepteurs, jeunes et inexpérimentés. L'étape 3D, souvent imposée par une structure académique, permet de se rendre compte du rendu du projet en adéquation avec le règlement du tournoi. Le rendu 3D d'un robot est aussi un moyen d'échanger avec tous les membres de l'équipe en les motivant encore plus. Cette étape permet également de générer des documents à fin de publication ou de simulation. Comment se comportera le robot face à un adversaire ? C'est donc une phase nécessaire pour préparer sa stratégie.
Programmation d'un robot : les stratégies dans la conception
Une fois le robot construit, il faut le programmer au mieux de ses capacités. Les stratégies développées lors de sa conception doivent être mises en équationséquations. L'évolution et la complexité du programme sont ajustées par l'expérience des tournois. Les stratégies les plus performantes sont capables de s'adapter en fonction de chaque adversaire.

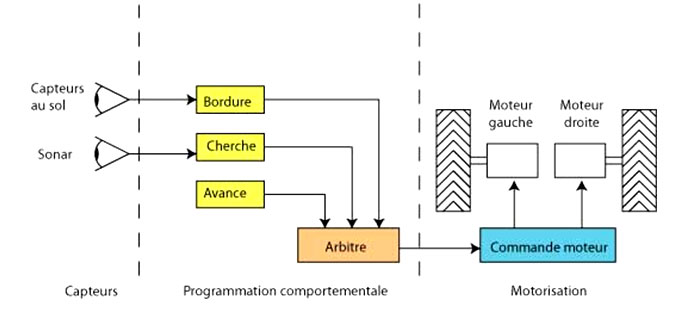
Programmation d'un robot
La programmation d'un robot de type sumo est identique à celle de n'importe quel robot autonome. Elle est utilisée sur les robots aspirateurs Roomba ou encore sur le robot martien Pathfinder. Elle est à la portée de n'importe qui ayant déjà programmé un microcontrôleur. On appelle cette programmation « architecture à interaction prioritaire ».
Cette technique, développée au MIT (Massachusetts Institute of Technology) par le Pr Rodney Brook, est adaptée aux faibles ressources des microcontrôleurs. Mais elle a aussi permis de développer une nouvelle branche de la robotique qui essaie de copier les comportements élémentaires des insectes.
Minirobot : en route pour la compétition
Il ne s'agit pas d'un combat de titanstitans mais bien d'un match de robots « minisumo ». Intraitables, déterminés et habiles, ils sont prêts à tout pour remporter le tournoi et mettre à terre leurs adversaires. Au plus grand plaisir du public venu pour les encourager.

Combat de robots « minisumo »
Une compétition de robots « minisumo » est très différente des autres compétitions en robotiquerobotique. Dans ces rencontres, puisqu'il s'agit de combats entre deux robots, le spectaculaire est au rendez-vous. Les choses sont pourtant simples, pour être vainqueur, il faut pousser son adversaire en dehors du cercle de jeu. Malgré cela, les évidences sont mises à mal et la logique est incertaine. Il n'est pas rare d'assister à un combat inégal où le petit gagne contre le gros ou encore lorsque le plus mal conçu élimine un robot très sophistiqué dont la programmation est en défaut. Il n'y a pas de rencontres gagnées d'avance, il faut toutes les jouer, pour les remporter.
Ces combats sont en général très rapides, en moins de 10 secondes, donnant ainsi l'occasion au public d'assister à de nombreux matchs en peu de temps. Le tournoi se fait en deux temps sur une même journée. Le matin est consacré aux poules qualificatives afin que tous les participants réalisent suffisamment de rencontres. Ensuite, les phases finales ont lieu l'après-midi avec le principe de la double élimination permettant à chacun d'avoir une chance de se rattraper.
Il n'est pas rare de voir le public prendre parti pour le plus faible des deux robots, encourager le minisumo comme s'il s'agissait d'une créature pouvant être motivée et applaudir le vainqueur, et le vaincu, avec le même enthousiasme.
À découvrir, le site sur le tournoi national robot sumo.
Le livre de l'auteur sur la construction d'un robot minisumo
Besoin d'un coup de main pour concevoir un robot minisumo ? Direction la librairie pour obtenir conseils et astuces pour réaliser un robot prêt au combat.

L'ouvrage Je construis mon robot sumo, aux éditions Dunod, aidera les débutants, comme les plus confirmés, dans la création d'un robot minisumo.
Manuel de conception d'un robot minisumo
Construire un robot minisumo, star incontestée des concours de robotique, offre une occasion de se mesurer à d'autres passionnés lors de tournois animés et stimulants. Riche de l'expérience de son auteur, expert en robotique et organisateur de tournois, cet ouvrage vous permet de relever ce défi. Après quelques rappels des connaissances de base en électronique, mécanique et programmation, il vous montre comment créer, pas à pas, votre propre robot minisumo, prêt à l'emploi :
- concevez-le en suivant un règlement et un cahier des charges précis ;
- agencez de façon optimale ses composants mécaniques et électroniques ;
- découvrez les principes de la programmation comportementale ;
- maîtrisez la stratégie de ses déplacements, pour plus d'efficacité face à l'adversaire.
Créateurs de robots, participant ou non aux concours de robotique mobilemobile, ou simples amateurs intéressés, cet ouvrage vous aide à élaborer le robot de vos rêves, robot minisumo et plus encore. Les enseignants, eux, y trouveront un support pratique pour aborder les multiples technologies de la robotique de manière ludique.

")








/ISIR/Fauverte Nicolas, tous droits réservés")






")





, Michael H. Wong (UC Berkeley) ; Traitement d’images : Joseph DePasquale (STScI)")
