

au sommaire
Les voitures autonomes sont dotées d'un système de vision à 360° très performant basé sur des capteurscapteurs d'ultrasonsultrasons, des LidarLidar et des caméras grâce auxquels elles peuvent détecter les véhicules en mouvementmouvement, distinguer les piétons et les cyclistes et même voir la nuit. Mais il est une chose qu'elles ne peuvent pas encore faire : déceler la présence d'un autre véhicule masqué par le coin d'une rue. Cela pourrait bientôt changer grâce aux travaux d'une équipe du CSAIL (Computer Science and Artificial IntelligenceIntelligence Laboratory), au MIT (Massachusetts Institute of Technology).
Baptisé CornerCameras, ce système d'imagerie, qui peut fonctionner avec l'appareil photo d'un smartphone, se sert de la réflexion lumineuse pour détecter des personnes ou des objets masqués par des angles morts en mesurant leur vitessevitesse et leur trajectoire en temps réel. En effet, même caché par l'angle d'un murmur, un objet réfléchit une faible quantité de lumièrelumière au sol qui se projette dans le champ de vision couvert par la caméra. C'est cette ombre portée qui est décomposée en images pour être analysée.
Simple dans son principe, cette technique se révèle aussi efficace dans la plupart des conditions d'éclairage. Elle fonctionne à l'extérieur mais également à l'intérieur des bâtiments et n'est pas perturbée par la pluie. Et le fait qu'elle puisse travailler avec le capteur photovidéo d'un smartphone du commerce laisse augurer la possibilité de l'intégrer facilement et à faible coût dans des voitures autonomes.

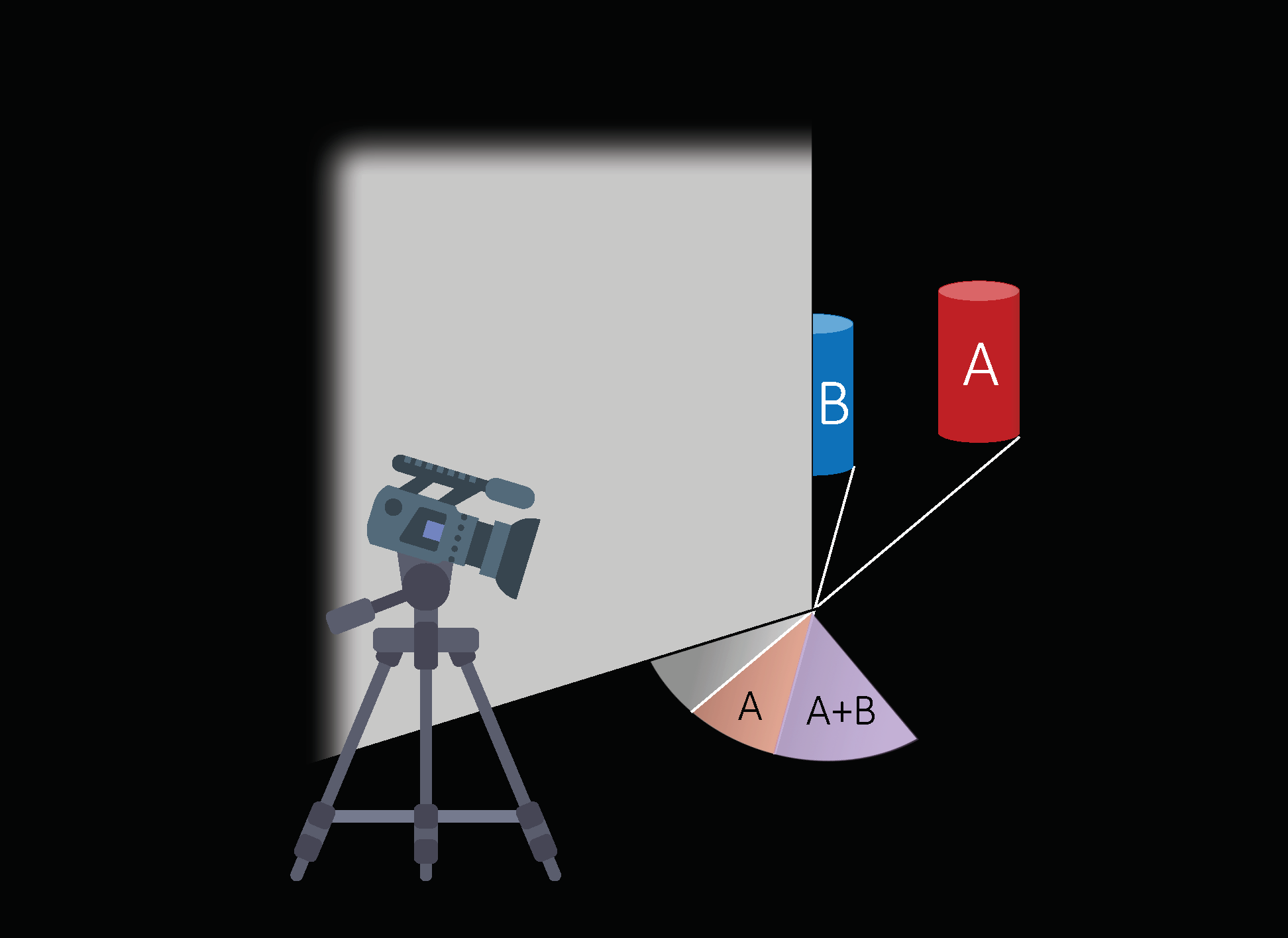
Dans cette infographie représentant le système CornerCameras, les objets « A » et « B » sont masqués par un angle mort. La caméra filme leur ombre portée au sol en décomposant une séquence d’images sur plusieurs secondes afin de distinguer les deux objets et de suivre leur trajectoire s’ils se déplacent. © MIT CSAIL
CornerCameras est capable de révéler le nombre de personnes ou d’objets
Dans le détail, la technique du CSAIL consiste à générer une série d'images unidimensionnelles sur une duréedurée de plusieurs secondes en filmant le sol sur la zone d'un angle mort. Ces images sont ensuite assemblées et analysées pour détecter les variations lumineuses provoquées par les ombres portées. CornerCameras est capable de révéler le nombre de personnes ou d'objets en les représentant sous forme de lignes sur un graphique qui suit la vitesse angulaire au fil du temps. Les lignes épaisses indiquent que l'objet est proche tandis que les lignes plus fines signalent qu'il est plus éloigné.
L'équipe du MIT a testé son système avec des personnes marchant dans une pièce dont la porteporte était entrouverte. En se basant sur la lumière réfléchielumière réfléchie sur un seul angle au sol, elle a pu déterminer le nombre de personnes présentes et leur sens de déplacement. En observant deux angles adjacents, le logiciel a même pu trianguler de façon approximative l'emplacement du sujet dans la pièce.
Cependant, les chercheurs soulignent les limites de CornerCameras qui ne fonctionne pas lorsqu'il n'y a pas de lumière ou bien si l'éclairage dans la zone non visible est trop faible. Le système a également des difficultés avec l'éclairage changeant lorsque des nuagesnuages occultent le soleilsoleil par intermittence. Les travaux de développement vont se poursuivre, avec notamment des tests sur une plateforme en mouvement, condition sine qua non pour pouvoir envisager une intégration de ce dispositif dans une voiture autonome.
Ce qu’il faut
retenir
- CornerCameras se sert de la réflexion lumineuse au sol pour détecter des personnes ou des objets masqués par des angles morts.
- Ce logiciel peut fonctionner avec les images produites par un smartphone ou une webcam.
- Le système pourrait aider les voitures autonomes à détecter l’arrivée d’un autre véhicule ou le surgissement d’un piéton au coin d’une rue.


 que la Ford Fusion hybride autonome peut circuler dans l’obscurité la plus totale sans caméras. © Ford")





















