

au sommaire
La nature est bien faite. C'est pourquoi une équipe internationale de chercheurs s'est inspirée des yeux de libellules ou de mouches pour créer un capteurcapteur photo et vidéo. L'objectif n'est pas tant d'équiper des robots de deux yeux exorbités, mais de créer de nouveaux capteurs dotés d'un large et profond champ de vision, et capables de détecter instantanément les mouvementsmouvements les plus infimes.
La grande majorité des caméras et appareils photo numériques actuels se basent sur le fonctionnement de l'œil humain. Ainsi, ils sont constitués d'une lentillelentille (ensemble cornée et cristallin) projetant l'image sur un capteur (rétinerétine). La résolution est conséquente, mais la profondeur de champ plus limitée, et la sensibilité au mouvement moins importante que celle des yeux de certains arthropodes. Chez ces derniers, chaque œilœil est composé d'une mosaïque de minuscules yeux (des ommatidiesommatidies). Chacun voit de façon nette quelle que soit la distance du sujet, et l'ensemble est extrêmement sensible aux mouvements. Le seul souci, c'est que la résolution est faible, c'est bien pour cette raison que les yeux sont de taille démesurée.
Une impression de déjà-vu pour une caméra-insecte
Les travaux du groupe de chercheurs provenant du CNRS, de l'École polytechnique fédérale de Lausanne (EPFL), du Fraunhofer institute for applied optics and precision engineering (IOF) et de l'université de Tübingen, ne présentent pas une véritable nouveauté. Ils font fortement penser à ceux que l'équipe de John Rogers (université de l'Illinois, États-Unis) avait publiés dernièrement dans la revue Nature.
Toutefois, leur prototype Curvace (Curved Artificial Compound Eye) ne repose pas sur un capteur hémisphérique, mais sur un cylindre. En outre, Curvace est associé à un procédé puissant de traitement d'image numérique. Sur une vidéo, réalisée par l'équipe, on peut voir un petit robot évoluer dans une pièce. L'image qu'il obtient est fortement pixellisée en raison de la faible résolution. En revanche, le processeur embarqué est capable d'interpréter le flux vidéo en temps réel. Le robot est donc en mesure de se déplacer de façon très précise, et de s'arrêter devant un obstacle, qu'il fasse jour ou nuit.
 pour offrir un angle de vision horizontal de 180° et de 60° verticalement (illustration B). Le tout pèse seulement 1,75 g et ne consomme que 0,9 watt. © Curvace")
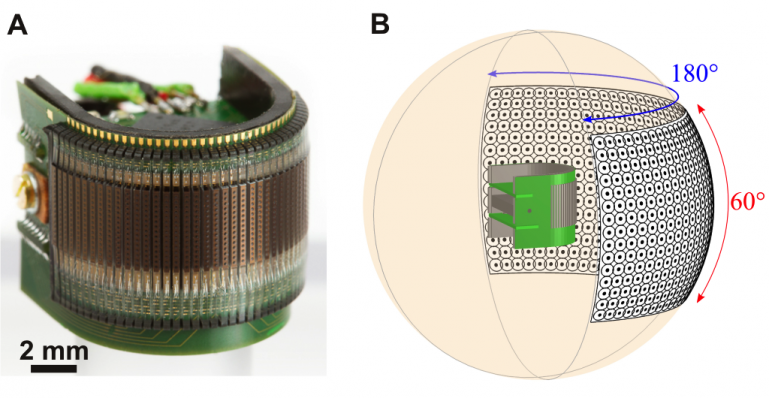
Parfaitement alignés, les 180 photorécepteurs et leurs microlentilles reposent sur un circuit imprimé souple. Épais de moins d’un millimètre, l’ensemble est plaqué sur un semi-cylindre de 2,2 cm3 (photo A) pour offrir un angle de vision horizontal de 180° et de 60° verticalement (illustration B). Le tout pèse seulement 1,75 g et ne consomme que 0,9 watt. © Curvace
Cet « œil » robotique est un assemblage de 180 photorécepteurs positionnés sur la surface d'un circuit imprimé souple. Chaque capteur est recouvert d'une microlentille. L'ensemble fait moins d'un millimètre d'épaisseur. Le prototype présenté a été appliqué sur un demi-cylindre pour obtenir un angle de vision horizontal de 180° et vertical de 60°. La conception n'a pas été évidente, puisqu'elle a nécessité un alignement extrêmement précis des différentes couches, pour qu'elles soient correctement axées une fois appliquées sur une surface cylindrique. Le fait que le dispositif soit souple permet de l'adapter à plusieurs formes de supports.
Outre les applicationsapplications liées à la vidéosurveillance, selon les chercheurs, cette minicaméra pourrait être utilisée dans le secteur aéronautique afin de détecter la présence d'aéronefsaéronefs et éviter ainsi les collisions, ou encore pour évaluer la distance d'atterrissage.

par Sylvain Biget, Futura
le 3 juin 2013
. Cliquez sur l’image pour voir l’animation. © Hans Hartung, Wikipédia, by sa 2.0")






















