

Des ingénieurs japonais ont créé un système de fixation et de contrôle unifié permettant d’assembler des petits drones pour en constituer un plus gros en plein vol. Une idée originale avec des techniques inspirées de celles des avions de ravitaillement en vol.
au sommaire
C'est un secret de polichinelle, mais comme pour les humains, les petits drones ont des atouts que les gros n'ont pas et vice-versa. Autrement dit, un petit drone ne pourra pas soulever grand-chose d'autre que lui-même, mais il sera vif, rapide, très manœuvrable. Il aura de surcroît la capacité de s'introduire un peu partout. Quant au gros drone, il pourra porter une charge utile plus importante, mais sera plus difficile à faire décoller et son évolution autour de structures sera bien plus pataude et lente.
Pour trouver la juste taille par rapport à un objectif défini, pourquoi ne pas assembler autant de petits drones que nécessaire pour en obtenir un gros ? C'est la solution pour laquelle ont opté des ingénieurs de l'Université de Tokyo au Japon. Leurs prototypes de drones sont capables de s'assembler ou de se désolidariser en plein vol. Avec cette capacité, il est alors possible d'introduire plusieurs petits drones via l'interstice d'un bâtiment, pour les assembler une fois à l'intérieur de celui-ci afin réaliser des tâches nécessitant un drone de taille plus conséquente. De même, un gros drone peut se diviser en plusieurs unités de taille moyenne pour se répartir sur plusieurs espaces.
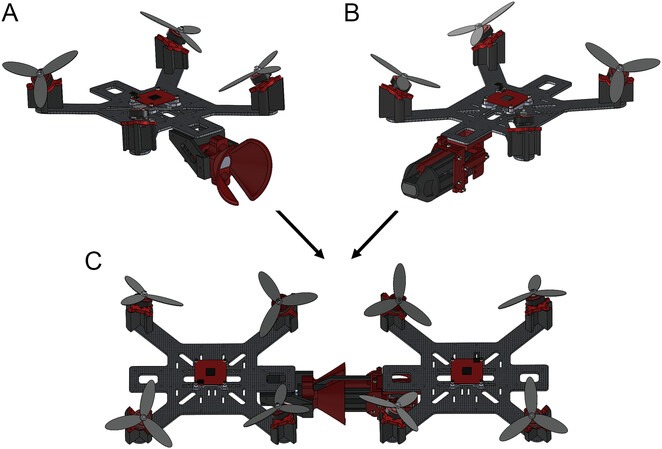
 Unité de cric. B) Branchement de l'unité. C) État assemblé. © <em>Advanced Materials technologies</em>")
L’union des drones fait la force
Dans l'expérimentation, il s'agissait de petits quadricoptères, mais qui avaient la particularité de disposer d'un système de fixation mâle ou femelle pour qu'ils puissent s'emboîter l'un dans l'autre. Ce procédé d'amarrage est directement inspiré des systèmes de ravitaillement en vol utilisés par les armées de l'airair. Comme pour les perches de ravitaillement, un petit entonnoir se trouve sur un côté du mécanisme afin de corriger facilement les erreurs d'alignement. Pour sécuriser la solidarisation des drones, des systèmes de couplage sous la forme d'aimantsaimants pouvant être activés ou non sont également disponibles.
L'ordinateur de bord permet à chacun des appareils de communiquer sa position aux autres pour qu'ils puissent se connecter. Pour le moment, les chercheurs se sont contentés d'assembler en vol seulement deux drones, mais ils estiment qu'il est possible de répliquer le système. Pour assurer leur contrôle, les scientifiques ont développé deux procédés : un système de contrôle distribué qui permet de faire fonctionner chaque unité indépendamment et un autre les faisant œuvrer de concert lorsqu'ils sont assemblés.












 et en vertical de 6 m/s. Il est équipé d’un système de Contrôle intelligent d’orientation (CIO) et d’un GPS. Son temps de vol maximum varie entre 10 et 15 minutes. Lorsque la communication entre le contrôle principal et l’émetteur est coupée, le système GPS ramène automatiquement l’engin à son pilote et le pose au sol.
© Don McCullough, CC by-nc 2.0")











