, la visibilité que produit un phare classique sous la pluie. À droite (smart headlight), la visibilité obtenue par le système d’éclairage intelligent mis au point par les chercheurs du laboratoire Carnegie Mellon. © Carnegie Mellon")
, la visibilité que produit un phare classique sous la pluie. À droite (smart headlight), la visibilité obtenue par le système d’éclairage intelligent mis au point par les chercheurs du laboratoire Carnegie Mellon. © Carnegie Mellon")
au sommaire
Lorsque de la conduite sous la pluie, le faisceau projeté par les phares crée un éblouissement, en se reflétant sur les gouttes d'eau. Une gêne dont le conducteur n'a pas forcément conscience mais sur laquelle des chercheurs de l'université Carnegie Mellon ont planché. Ils ont mis au point un prototype de phare capable de moduler l'éclairage afin de passer entre les gouttes d'eau après avoir anticipé leur position.
Composé d'un vidéoprojecteur, d'une caméra vidéo, d'un diviseur de faisceau 50/50, le système est piloté par des algorithmes qui exécutent l'opération en seulement 13 millisecondes. Si ce vidéoprojecteur affichait son image sur un murmur, on verrait des gros pixels noirs et mobilesmobiles sur fond blanc : chaque pixel se trouvant dans l'axe d'une goutte, celle-ci n'est pas éclairée.
Des essais effectués en laboratoire avec un simulateur de pluie prouvent l'efficacité de cette technique qui réduit considérablement l'éblouissement. Robert Tamburo, l'un des étudiants-chercheurs impliqué dans le projet, a expliqué à Futura-Sciences le fonctionnement du prototype.
 joue le rôle du phare tandis que la caméra filme la pluie et que le diviseur de faisceau (<em>beam splitter</em>) sert à coordonner les deux informations. Les algorithmes entrent en scène pour déterminer la position des gouttes d’eau et anticiper leur direction afin de littéralement faire passer les rayons entre les gouttes. © Carnegie Mellon")
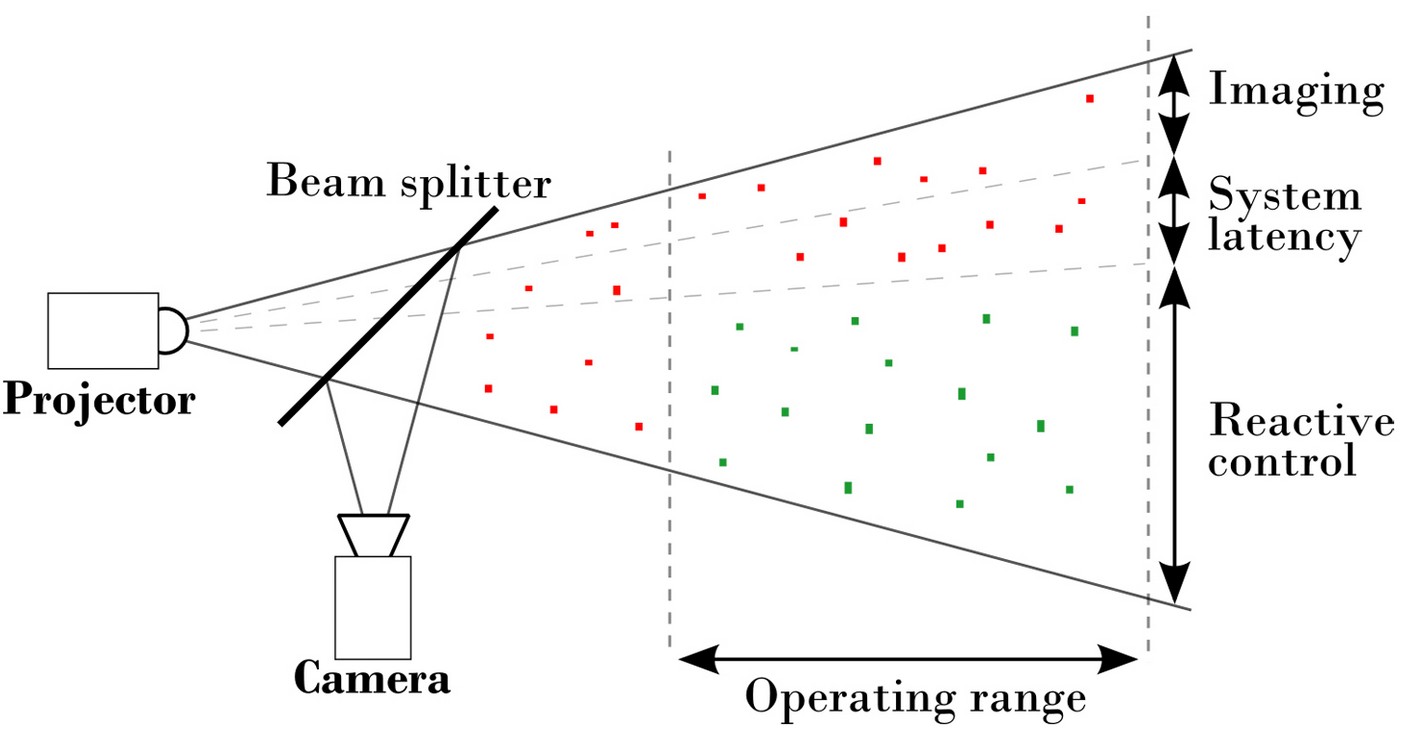
Vue schématisée du fonctionnement du système. Le vidéoprojecteur (projector) joue le rôle du phare tandis que la caméra filme la pluie et que le diviseur de faisceau (beam splitter) sert à coordonner les deux informations. Les algorithmes entrent en scène pour déterminer la position des gouttes d’eau et anticiper leur direction afin de littéralement faire passer les rayons entre les gouttes. © Carnegie Mellon
La traque aux gouttes de pluie
« Nous utilisons un vidéoprojecteur comme source de lumièrelumière afin de pouvoir contrôler individuellement chaque rayon, ce qui n'est pas faisable avec les phares standards d'un véhicule. La caméra sert à filmer la scène afin de détecter les gouttes de pluie qui tombent. Le diviseur de faisceau nous permet de réunir virtuellement le projecteurprojecteur et la caméra dans un même espace coordonné de telle sorte que nous obtenons la correspondance entre les pixels, ce qui évite d'effectuer une reconstitution 3D. »
Vient ensuite le travail des algorithmes qui se compose de quatre phases. « Les algorithmes (exécutés à partir d'un processeur Core i7 quadruple cœur) comprennent :
- La localisation des gouttes de pluie filmées par la caméra.
- La mesure des paramètres tels que la taille, la position, la vitessevitesse, l'accélération, etc. des gouttes de pluie détectées.
- La prédiction de la position future des gouttes de pluie détectées.
- Le contrôle des rayons émis par le projecteur afin d'éviter d'éclairer les zones où les gouttes de pluies vont tomber. »
Encore des années de développement pour ce phare intelligent
Le prototype a été testé en laboratoire avec un simulateur de pluie mais pas encore en conditions réelles. Et d'après Robert Tamburo, il devrait être tout aussi efficace avec de la neige car, comme l'explique le chercheur, « les flocons réfléchissent plus de lumière et tombent moins vite ».
Il reste néanmoins encore beaucoup de travail avant qu'un tel système finisse par équiper nos voitures. Tout d'abord parce qu'il ne peut pas fonctionner avec les phares classiques qui ne permettent pas de séparer les rayons. « Pour que le système puisse être intégré dans les automobilesautomobiles, il faut qu'il soit plus rapide et plus compact », poursuit Robert Tamburo.
Il restera pour cela développer un appareillage spécifique afin d'intégrer une caméra, une source de lumière ainsi que l'électronique pour traiter les informations. « Des algorithmes plus sophistiqués seront nécessaires pour optimiser la vitesse et prendre en compte le mouvementmouvement du véhicule, les turbulencesturbulences, etc. », ajoute le chercheur qui estime qu'il faudra entre 3 et 4 ans pour atteindre cet objectif. La commercialisation devrait ensuite pendre quelques années de plus, a-t-il reconnu.

par Marc Zaffagni
Publié le 12 juillet 2012 à 9:28
Comparatifs et bons plans

Conso
Guides smartphones
Quel est le meilleur smartphone Android en 2025 ?

Conso
Guides audio
Ce casque sans fil Marshall chute à moins de 200 € : une aubaine pour les fans de musique !

Conso
Guides PC et tablettes
Cdiscount : énorme chute de prix sur ce PC portable polyvalent !

Conso
Guides Télécoms
Le forfait 5G le plus généreux du moment : 200 Go à 9,99€ par mois avec Syma Le neuf !

Conso
Guides Télécoms
Jusqu’à -89% sur les Smart TV Samsung avec une Bbox : la promo choc de Bouygues Telecom !

Conso
Guides smartphones
Samsung Galaxy A25 : ce smartphone 5G n'a jamais été aussi accessible !

Tech
support téléphone voiture
supports téléphone voiture - notre comparateur

Tech
vidéoprojecteur
Les vidéoprojecteurs en test 2024

Tech
caméra de recul
caméras de recul - nos gagnants

Tech
forfait bloqué


 est recouverte de graphène, c'est-à-dire d'une couche monoatomique de carbone, et la cathode en nickel (Ni(OH)2/MWNT) est garnie de nanotubes de carbone. Ces surfaces facilitent considérablement le mouvement des charges électriques. © Hailiang Wang et al./Science")







 que la Ford Fusion hybride autonome peut circuler dans l’obscurité la plus totale sans caméras. © Ford")
. Crédit Intel.")










