
au sommaire


Un seul moteur suffit pour faire battre les quatre ailes du robot, et donc pour lui permettre de s'envoler. © Leif Ristroph, université de New York
Le concept de l’ornithoptère ne date pas d'hier. Voilà plusieurs siècles que l'Homme cherche à créer des machines lui permettant de voler grâce à des mouvementsmouvements battus, comme les oiseaux. Il faut l'avouer, peu de succès ont été au rendez-vous. Malgré cela, l'idée survit, notamment dans l'esprit de quelques roboticiens. Pour preuve : plusieurs engins miniatures volant comme les libelluleslibellules ou les colibriscolibris ont été dévoilés ces dernières années.
Ces concentrés de technologie sont aptes à voler, mais de là à adopter un vol stationnairevol stationnaire... il n'y a qu'un pas que de nombreux minirobots ailés ne peuvent franchir. Certains y arrivent, mais grâce à l'utilisation de stabilisateurs, de mécanismes de contrôle en retour complexes ou d'appendices aérodynamiques bien précis. Autant dire que ces éléments ont de quoi compliquer la conception de tels engins. Une solution relativement simple réside pourtant dans la nature, celle-là même qui inspire tous ces roboticiens.
Beaucoup ne l'ont pas vue car elle se trouve en réalité sous l'eau ! Deux mathématiciensmathématiciens de l'université de New-York, Leif Ristroph et Stephen Childress, viennent ainsi de présenter un ornithoptère volant, y compris en mode stationnaire, dont le fonctionnement est inspiré des mouvements de nage de la méduse. D'une forme conique, l'engin dispose de quatre ailes verticales fixées sur un châssis en fibres de carbonefibres de carbone, et qui sont mises en mouvement par un unique moteur. L'ensemble ne fait que 2,1 g.

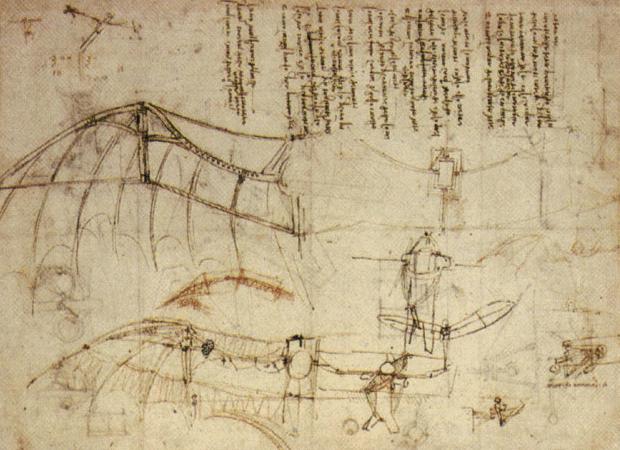
Le concept de l’ornithoptère ne date pas d’hier, puisque Leonardo di ser Piero, dit Leonardo da Vinci, en a esquissé un en 1488. © Wikimedia Commons, DP
Un nouvel ornithoptère de surveillance ?
Hautes de 8 cm, les ailes battantes sont plates tout en ayant la forme d'une goutte, sachant que la partie la plus large est dirigée vers le bas. Elles se composent d'une fibre de carbone et d'une feuille de polytéréphtalate d'éthylèneéthylène (ou Mylar), donc un plastiqueplastique. Ces structures diaphanes sont attachées deux à deux, et donc mises en mouvement par paire. Le comportement du robot repose notamment sur le fait qu'elles sont souples, et qu'elles se déforment d'autant plus que leurs fréquences de battements (jusqu'à plus de 30 HzHz) et leurs amplitudes sont importantes. En mouvement, elles génèrent des flux d'airair verticaux dirigés vers le bas, que l'on peut comparer aux déplacements d'eau causés par les contractions de l'ombrelle d’une méduse.
La stabilité de l'ensemble est assurée par la conception même de l'engin volant, puisque son centre de massemasse se trouve dans la partie basse du robot, là où se situe le moteur. Il n'y a donc pas de stabilisateurs, comme le précise l'article paru dans le Journal of the Royal Society Interface. Ce nouvel ornithoptère n'est pas encore énergétiquement autonome, ce qui signifie qu'il est alimenté par des fils électriquesfils électriques. À l'avenir, les prochaines versions devraient être équipées de batteries. Ses concepteurs le destinent à des applicationsapplications de surveillance, que ce soit dans un cadre civil (suivi de la pollution de l'air) ou militaire.

par Quentin Mauguit, Futura
le 20 janvier 2014


, le 2 (28 centimètres) et le Micro, petit dernier, long de 10 centimètres. On attend l'arrivée du prochain, encore en gestation et qui sera deux fois plus petit que l'actuel benjamin. © TU Delft")







")

 et son avatar en silicone (Medusoid, pour médusoïde). On remarque la structure radiaire du système musculaire de la méduse. À droite, cette structure reproduite à l'échelle micrométrique dans le médusoïde. © Kevin Kit Parker, Harvard University")










