

au sommaire
Automatiser les chariots-élévateurs déplaçant les palettes semble désormais à la portée des roboticiens. Pourtant, la réalisation d'un modèle utilisable en situation réelle n'est pas si simple. On aimerait éviter que des chariots emportés par l'excès de zèle cherchent à soulever leurs congénères ou à embarquer le personnel humain.
C'est en effet la vision et l'analyse de l'image qui posent les problèmes les plus ardus. Une équipe d'ingénieurs américains, de la société Transbotics, spécialisée dans les véhicules automatiques, et du National Institute of Standards and Technology (NIST), ont réalisé un système de vision complet capable de discerner parmi n'importe quoi d'autre l'objet de leur convoitise : une palette.
Contrairement à ce que l'on pourrait penser, distinguer une palette d'un être humain n'est pas si simple, surtout dans un automate simple, qui doit rester peu coûteux. Le système mis au point comporte deux « ladars » (LaserLaser Detection and Ranging), appelés également lidars (Light Detection and RangingLight Detection and Ranging). Equivalent optique d'un radar (acronyme de Radio Detection and Ranging, faut-il le rappeler), un ladar sert à mesurer la distance ou d'autres paramètres d'un objet éloigné à l'aide d'un rayon laser.
Vision simpliste mais réaliste
Le premier ladar est fixé au pied du robot et sert à détecter les obstacles, humains ou pas, mais aussi à repérer une palette au fond d'un camion ou encore de mesurer la distance de ce dernier. Le second ladar, dit panoramique, doit être juché au sommet du véhicule automatique. Monté sur un plateau rotatif, il balaie ce qui se trouve devant lui en un mouvementmouvement de scanner, ligne par ligne.
. Crédit : NIST.")
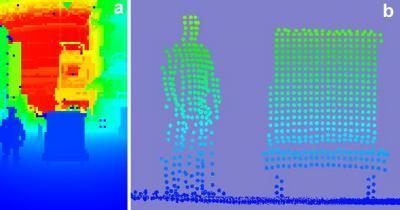
Avec sa vision à laser approximative, le chariot-élévateur peut estimer globalement les distances, comme sur l'image de gauche, où la couleur rouge indique un grand espace libre, ou bien analyser les formes devant lui et repérer une palette (image de droite). Crédit : NIST.
Un logiciel analyse l'image du ladar panoramique et peut en tirer différents types d'images, par exemple un graphique en fausses couleurscouleurs où la teinte indique la distance. Le robot peut aussi construire une image plus réaliste, réalisée point par point, et montrant la silhouette des objets.
Derrière ce système d'acquisition, un logiciel de contrôle peut gérer toutes les manœuvres que doit savoir exécuter un chariot-élévateur automatique : charger et décharger les palettes, estimer l'espace libre restant dans le camion et comptabiliser les palettes en attente. Dès 2007, Transbotics espère réaliser un chariot automatique intégrant ces fonctionnalités.


 est semblable en taille, en forme et en structure, à l'oeil multifacette d'un insecte (en bas)")






 ? © phonlamaiphoto, Adobe Stock")














