

au sommaire
Les méduses exécutent des mouvementsmouvements gracieux durant leurs déplacements. Elles contractent rythmiquement leur ombrelle pour expulser l'eau qu'elles enferment. Par réaction, ces cnidaires pélagiques sont alors propulsés vers le haut. Elles avancent donc, lorsqu'elles nagent activement, par bonds.
La fermeture de l'ombrelle est causée par la contraction d'un muscle circulaire situé sur la face interne de l'animal. Lorsque l'effort musculaire se relâche, la mésogléemésoglée, substance gélatineuse enfermée entre les deux couches de tissus, permet au corps de réacquérir sa forme initiale. En l'absence de squelette internesquelette interne, ces mouvements ne peuvent qu'être symétriques et les médusesméduses, incapables de nager véritablement, restent des animaux planctoniques, se déplaçant au gré des courants marins.
Des chercheurs de la Virginia Tech, menés par Yonas Tadesse, se sont inspirés de cet invertébréinvertébré pour développer un nouveau robot sous-marinsous-marin nommé Robojelly (une méduse se dit jellyfish en anglais). Il se déplace grâce à des mouvements de nage en tout point semblables à ceux exécutés par le modèle Aurelia aurita. Pourtant, il ne possède pas de moteur ! Son fonctionnement dépend intégralement des matériaux employés et de la survenue de réactions chimiquesréactions chimiques à leur surface. Sa conception est présentée dans la revue Smart Materials and Structures.
Ce robot Robojelly s'inspire directement de la méduse Aurelia aurita. Dans la première partie de la vidéo, l'automate n'est pas autonome, il fonctionne grâce à un apport externe d'électricité. Le gros plan présenté après 17 secondes montre la contraction de l'ombrelle artificielle grâce à l'utilisation d'hydrogène. Ce mouvement est moins puissant que celui produit en utilisant de l'électricité. © InstituteofPhysics, YouYube
Robojelly : une méduse propulsée grâce au platine
Le robot se compose de 8 segments de siliconesilicone s'assemblant pour former une ombrelle artificielle d'un diamètre de 164 mm et d'un poids de 242 g. Sur leur face interne, ces éléments abritent des muscles composés entre autres d'un matériau à mémoire de formemémoire de forme (SMA) enchâssé dans des nanotubes de carbonenanotubes de carbone en plusieurs couches et recouverts de platineplatine. Un SMA est capable de reprendre sa forme d'origine après avoir été déformé. Ces muscles synthétiques peuvent changer de forme suite à l'action d'un stimulus : la chaleurchaleur.
L'énergieénergie calorifique nécessaire au fonctionnement de l'automate provient d'une réaction chimique exothermiqueexothermique entre l'oxygène et l'hydrogènehydrogène, et catalysée par les nanoparticules de platine. Le produit formé lors de cette réaction n'est autre que de l'eau. Les deux gazgaz sont contenus dans des réservoirs mais le robot pourrait à terme exploiter l'oxygène dissous dans l'eau. Cette réaction chimique, l'oxydationoxydation de l'hydrogène, est également utilisée dans les piles à combustible. Mais ici, elle provoque directement le mouvement, et non de l'électricité.
 et l'hydrogène (H<sub>2</sub>) a lieu à la surface des nanotubes faits de plusieurs couches de carbone (MWCNT). La chaleur produite, en rouge, est conduite vers le matériau à mémoire de forme (SMA). Des particules de platine (Pt) sont aussi enchâssées entre les différentes couches de carbone. Cette réaction chimique provoque l'apparition d'eau (H<sub>2</sub>O). © adapté de Tadesse <em>et al.</em> 2012, <em>Smart Materials and Structure</em>")
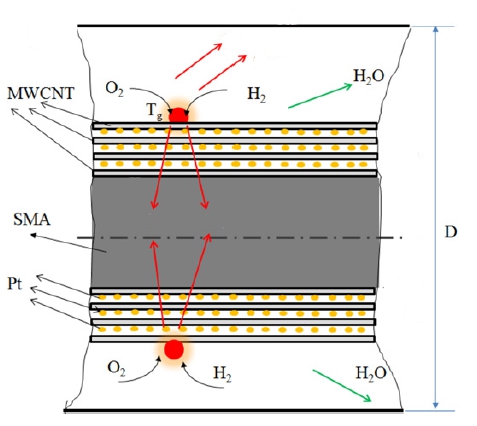
Structure d'une fibre contractile artificielle. La réaction exothermique entre l'oxygène (O2) et l'hydrogène (H2) a lieu à la surface des nanotubes faits de plusieurs couches de carbone (MWCNT). La chaleur produite, en rouge, est conduite vers le matériau à mémoire de forme (SMA). Des particules de platine (Pt) sont aussi enchâssées entre les différentes couches de carbone. Cette réaction chimique provoque l'apparition d'eau (H2O). © adapté de Tadesse et al. 2012, Smart Materials and Structure
La chaleur produite dans les tubes est transmise au SMA grâce à la grande conductivité thermiqueconductivité thermique des nanotubes de carbone. Selon les inventeurs, l'utilisation d'oxygène et d'hydrogène pourrait fournir une plus grande densité énergétique que le recours à une source électrique. Les propriétés contractiles des muscles dépendent directement de la taille des tubes employés. Les plus efficaces mesurent 1,6 mm de diamètre.
Le projet est toujours en phase de test. Une vidéo est néanmoins disponible pour présenter les résultats déjà obtenus. Pour l'instant, les 8 parties du robot se contractent toujours simultanément. Une des prochaines étapes de développement consistera à rendre chaque morceau autonome. Cette propriété permettra aux robots de se diriger dans des directions précises, tout en étant guidés par un opérateur.

par Quentin Mauguit, Futura
le 23 mars 2012


 CC by-sa")



 et son avatar en silicone (Medusoid, pour médusoïde). On remarque la structure radiaire du système musculaire de la méduse. À droite, cette structure reproduite à l'échelle micrométrique dans le médusoïde. © Kevin Kit Parker, Harvard University")
















