
au sommaire


Cet extrait d’une animation vidéo montre comment le robot renifleur du MIT pourrait progresser sous l’eau et scanner les soutes d'un navire à travers la coque à l’aide d’un émetteur ultrasons. Le but est de détecter des caches de drogue ou d’autres produits de contrebande. © MIT
L'ingéniosité des trafiquants de droguedrogue et des contrebandiers n'a malheureusement pas de limites. Une part importante de ce trafic passe par les voies maritimes, et les autorités portuaires ont bien du mal à inspecter toutes les embarcations qui circulent. Une solution pourrait résider dans l'utilisation de robots suffisamment discrets pour ne pas être repérés des malfrats et assez efficaces pour contrecarrer leurs ruses.
Une mission que pourrait remplir le robot renifleur sur lequel travaille une équipe du Massachusetts Institute of Technology. Dévoilé le mois dernier à la conférence IROS (Intelligent Robots and Systems), il se présente sous la forme d'une boule grande comme un ballon de rugby. L'appareil comporte une face plane prévue pour se coller à la coque d'un navire afin d'en scanner l'intérieur à l'aide d'un émetteur ultrasonsultrasons, et ainsi détecter des parties creuses susceptibles de contenir de la drogue ou d'autres marchandises prohibées. À l'origine, expliquent ses inventeurs, ce robot a été conçu pour inspecter les bassins des réacteurs nucléaires en vue de déceler d'éventuelles fissures. Sa taille réduite et son système de propulsion discret pourraient en fait lui permettre de se cacher à l'entrée des ports pour inspecter les bateaux sans attirer l'attention des contrebandiers. Son coût de fabrication abordable, aux alentours des 600 dollars (473 euros au cours actuel), autoriserait même le déploiement d'une flottille.
 et la seconde, perméable, contient le système de propulsion. © MIT")
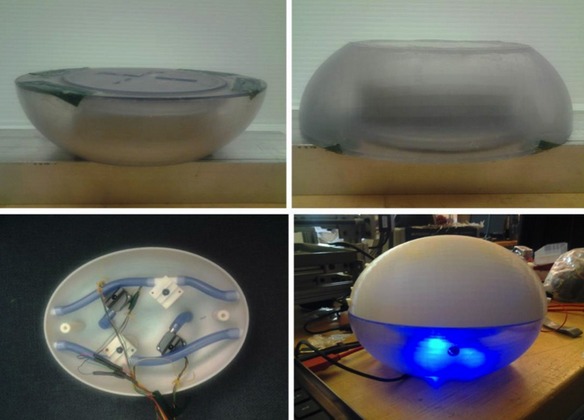
Le robot sous-marin du MIT se compose de deux parties, visibles sur ces clichés. La première renferme la partie électronique (centrale inertielle) et la seconde, perméable, contient le système de propulsion. © MIT
Pas encore de prototype opérationnel
Le robot a été mis au point par le professeur Harry Asada et son étudiante en génie mécanique Sampriti Bhattacharyya. Il est constitué de deux parties, l'une étanche, l'autre perméable. La première renferme la plateforme électronique ainsi que la batterie lithium-ionbatterie lithium-ion tandis que la seconde contient le système de propulsion composé de six pompes qui expulsent l'eau à travers des tuyaux répartis de manière à plaquer le robot contre une surface tout en lui permettant d'avancer. Dans la partie étanche, une centrale inertielle (trois accéléromètres et trois gyroscopes) est couplée à un algorithme qui ajuste le débit sur chaque tuyau afin de stabiliser le robot et de maintenir sa trajectoire. Il peut naviguer à une vitessevitesse comprise entre cinquante centimètres et un mètre par seconde. Sa batterie lui assure quarante minutes d'autonomie.
Le prototype initial a servi à valider le système de propulsion et de contrôle, mais il n'était pas équipé d'un capteurcapteur ultrasons. L'équipe du MIT travaille sur une nouvelle version qui sera équipée d'une batterie rechargeable sans fil et d'un système de propulsion moins énergivore qui devrait lui permettre d'atteindre 100 minutes d'autonomie. Un gros travail reste à faire sur la détection par ultrasons. Un tel système ne peut fonctionner que si l'émetteur est en contact avec la surface qu'il doit scanner. Or, la coque des navires est souvent recouverte d'une couche faite d'un mélange de coquillages et d'alguesalgues qui pourrait empêcher le robot de s'y plaquer correctement. L'alternative consiste à maintenir l'appareil à une distance précise qui soit un multiple de la longueur d'ondelongueur d'onde. Pour cela, le professeur Asada et son étudiante planchent sur un système mécanique pour créer ce qu'ils appellent des tampons hydrodynamiques grâce auxquels le robot pourrait travailler sans être en contact direct avec la coque.





")


















