

Des chercheurs de Google DeepMind viennent de mettre au point un test standardisé pour évaluer les performances des robots quadripèdes. En s’inspirant des compétitions canines, ils ont conçu un parcours d’obstacles qui porte le nom de… Barkour.
au sommaire
Les robots ont beaucoup évolué ces dernières années, gagnant en vitessevitesse et agilité. L'une des formes les plus populaires est le quadrupède, ou robot-chienchien, comme Spot de Boston Dynamics. Cependant, comment comparer les différents modèles lorsqu'il n'existe aucune norme pour mesurer leurs performances ?
Pour résoudre ce problème, des chercheurs de Google DeepMind ont décidé de créer un parcours d'obstacles destiné à servir de standard pour mesurer les performances des robots. Baptisé Barkour, contraction de bark (aboyer en anglais) et de parkour, il est inspiré des parcours d'agilité pour chiens.

Des robots deux fois moins rapides que des chiens
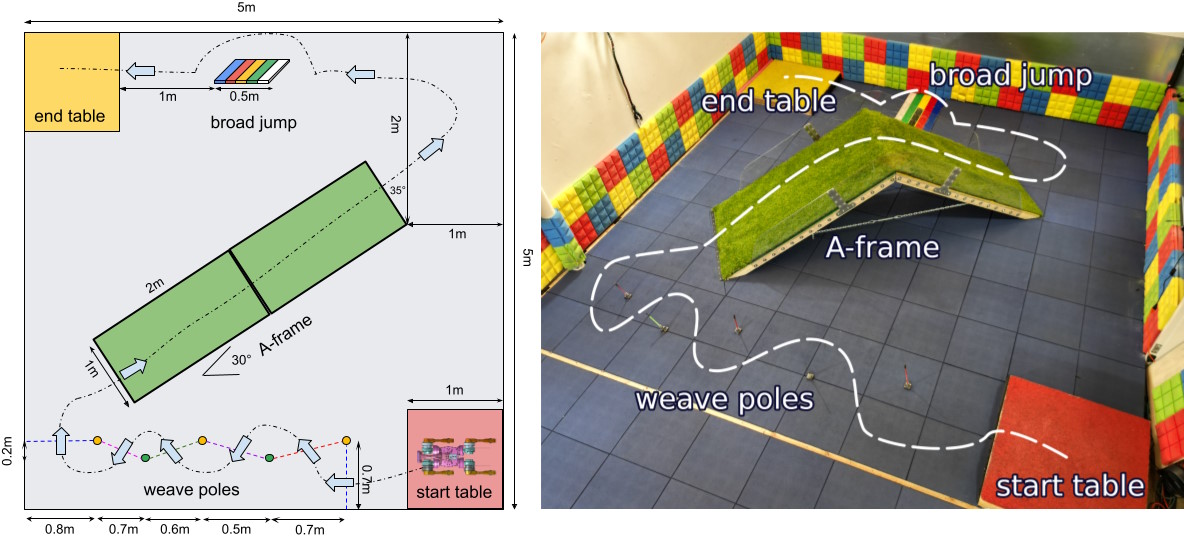
Le parcours s'inscrit dans un carré de 5 mètres de côté, et contient des tables de départ et d'arrivée, un slalom, une palissade (ou A-frame) avec montée et descente, et un saut en longueur. Ils ont d'abord testé Barkour avec des « dooglers », les chiens des employés de GoogleGoogle, qui ont réussi à effectuer le parcours en 10 secondes. Les robots-chiens utilisés dans le test ont mis deux fois plus de temps.
Les chercheurs notent ensuite la performance entre attribuant un score d'agilité compris entre 0 et 1. Il est calculé en prenant la note maximale, soit 1, et en soustrayant une pénalité de 0,1 pour chaque échec à un obstacle, ainsi que pour le temps passé au-delà de 10 secondes divisé par 100, soit par exemple 0,1 pour un robot qui met 20 secondes au total.
Les chercheurs espèrent que Barkour pourra servir de test standardisé afin de comparer les différents modèles de robots, ou encore d'évaluer les performances d'un même robot avec différents capteurscapteurs, afin d'atteindre à terme une agilité du niveau d'un animal.




 ont développé un robot aux allures de serpent pour explorer le Système solaire et notamment Encelade, la lune de Saturne, à la recherche de formes de vie. Image d'un robot-serpent rampant à la surface d'Encelade générée par une IA. © X. Demeersman, Bing Image Creator")









/ISIR/Fauverte Nicolas, tous droits réservés")









