








au sommaire


Principe de fonctionnement du GPS
- A - La détermination d'une position par le GPSGPS :
Les paramètres qui définissent la géodésie en un point M de la surface topographique sont ses coordonnées cartésiennes (X,Y,Z) ou ses coordonnées géographiques LONGITUDELONGITUDE et LATITUDELATITUDE (cosinus directeurs de la verticale en ce point). Le but de la géodésie devient la description spatiale directe de la forme de la surface topographique, sans chercher à lui imposer a priori le support approché de l'ellipsoïde. A la description géométrique doit s'ajouter la description dynamique en chaque point, où l'on se propose alors de connaître le potentiel et la pesanteur, et l'on fait concourir tout l'ensemble en une synthèse générale.
Les mesures sur lesquelles se base la géodésie tridimensionnelle sont : les mesures angulaires azimutales habituelles, les mesures de distances zénithales, les mesures de pesanteur qui concourent simultanément avec les mesures de nivellement à définir, les mesures astronomiques de latitude, longitude et azimut. Ainsi la géodésie est-elle libérée de tout a priori. Elle admet la complexité de son objet, elle reconnaît qu'aucune loi simple ne pourra la représenter. A l'arrivée du GPS, la géodésie s'est transformée !
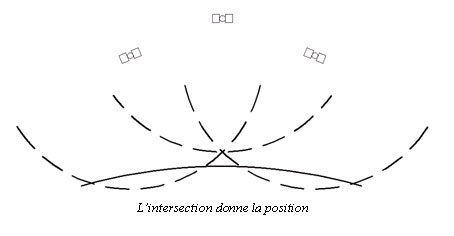
Le principe du positionnement GPS est très proche du principe de triangulationprincipe de triangulation. La constellation a été conçue de telle manière que partout sur Terre, on puisse voir au moins 4 satellites à tous moments. Les récepteurs fonctionnent sur le principe de la télémétrie : On mesure la distance entre l'utilisateur et un certain nombre de satellites de positions connues.
On définit ainsi des sphères centrées sur des satellites et dont l'intersection donne la position. Le récepteur GPS est capable d'identifier le satellite qu'il utilise à l'aide du signal pseudo aléatoire émis par chaque satellite. Il charge, à l'aide de ce signal, les informations sur l'orbite et la position du satellite. Pour mesurer la distance qui sépare le satellite du GPS, on mesure le temps TT mis par le signal pour aller de l'un vers l'autre. Le signal voyageant à la vitesse de la lumière, la distance recherchée est donnée par : D = c.T

La mesure de T nécessite une manipulation : le satellite et le récepteur émettent tous deux au même instant (instant réglé sur les horloges atomiqueshorloges atomiques des satellites, 2 au CésiumCésium et 2 au RubidiumRubidium d'une précision de 10E-12 sec) le code pseudo aléatoire (le récepteur en génère une réplique). Le récepteur retarde ensuite le début de cette émissionémission jusqu'à ce que son signal se superpose avec celui provenant du satellite (jusqu'à ce qu'ils sont en phase). La valeur de ce retard est ainsi le temps mis par le signal pour se propager du satellite jusqu'à l'utilisateur.
Cependant, les militaires américains, après avoir dégradé intentionnellement le signal GPS pour les utilisateurs civils au moyen d'un code sur la porteuse du signal, appelé SA (Selective Availability), ont décidé depuis Mai 2000 de supprimer cette dégradation et d'offrir à tous les utilisateurs une précision théorique de 25 m en tous points du globe. A priori, il n'est donc pas possible, avec 1 récepteur GPS d'obtenir une meilleure précision.
Mais détrompez-vous, une technique bien particulière permet, avec un réseau de points géodésiques existant, d'obtenir bien mieux...
- B - Les réseaux géodésiques :
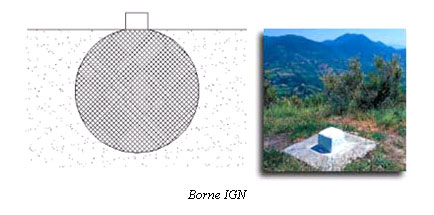
L'IGN (Institut Géographique National) est le pôle français de la cartographie et de la géodésie. Basé en région parisienne, l'institut s'est occupé dans le passé de calculer et d'implanterimplanter un réseau appelé « NTF » sur tout le territoire national de points durs nommés « bornes IGN » et dont les coordonnées géographiques sont connues centimétriquement dans le système de coordonnées approprié.
Il s'agit de bornes cubiques en granit lourdement encrées dans le sol par un poids d'un mètre cube de bétonbéton. A certains endroits, ce sont des repères en bronzebronze qui sont scellés dans un socle de béton. Ces points servent donc de base aux déterminations de coordonnées de tout autre point en France. Un réseau altimétrique également calculé par l'IGN vient compléter le réseau planimétrique des bornes.

Aujourd'hui, différents réseaux de points coexistent et chacun possède une applicationapplication particulière. Le réseau de la NTF est exploitable pour les travaux topographiques traditionnels avec des appareils comme des théodolites (mesures d'angles) et des tachéomètres (mesures de distances). La précision relative (entre 2 bornes) est de 1cm/km (densité des points : 1pt/9km²). Mais la venue du GPS, système bien plus précis, a conduit l'IGN a créer un réseau dont la précision intrinsèque est plus importante, pour le coupler aux travaux effectués par GPS. D'où la réalisation du RBF (Réseau de Base Français), d'une précision relative de 1mm/km, est associé à un système de coordonnées particulier et c'est avec ce couple que l'on peut au mieux exploiter la précision offerte par les GPS de pointe.
- C - L'obtention du centimètre :
Pour leur différents travaux topographiques qui exigent une précision centimétrique de par leur incidenceincidence juridiques (délimitations de propriétés, projets routiers, contrôles d'ouvrages d'arts...etc.), les géomètres-topographesgéomètres-topographes utilisent un mode de positionnement spécifique.
- Le mode de positionnement absolu avec ces récepteurs de pointe offre une position à 10 m près. Un récepteur, sur un point inconnu à déterminer, mesure la distance entre le satellite et lui-même. Il calcule le temps mis au signal pour lui parvenir et détermine le retard de phase entre ce dernier et le pseudo signal qu'il génère lui-même. Une position est fournie mais elle ne suffit pas pour ce genre de travaux.
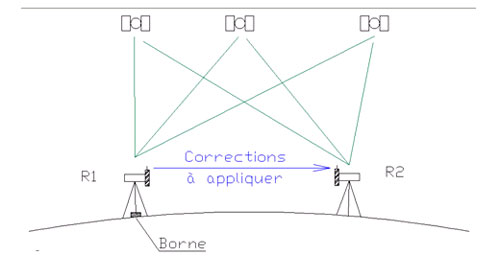
- Le mode de positionnement différentiel : on utilise 2 récepteurs GPS, en combinaison. On observe les mêmes satellites en même temps. Le premier récepteur, que nous appellerons R1 est placé sur un point connu en coordonnée, d'un réseau géodésique. Rappelons que ces réseaux sont d'une précision relative entre bornes de quelques centimètres. Le second récepteur, R2, est sur un point inconnu à déterminer centimétriquement. Les deux GPS sont alors équipé de modules de transmissions radio ou GSMGSM pour communiquer entre eux.
R1 compare les coordonnées qu'il reçoit des satellites et celle qu'un utilisateur lui a fournit au départ et qui correspondent au point connu où il se situe. Il en déduit des écarts qui sont en fait des corrections à appliquer pour être rattaché au réseau géodésique. Il les transmet à R2 qui reçoit ses propres coordonnées et comme il s'agit des mêmes satellites observés au même moment, R2 va appliquer ces écarts à ses coordonnées. Ce point est alors rattaché au réseau géodésique et sa position est donc connue au centimètre près.

Mais un autre facteur compte pour que le GPS fonctionne bien : la géométrie des satellites, le GDOP (Geometric Dispertion Of Position). Il faut non seulement qu'il y ait au moins 4 satellites visibles dans le ciel mais aussi qu'il soit bien répartis sur la voûte céleste, sans quoi, la précision est altérée.

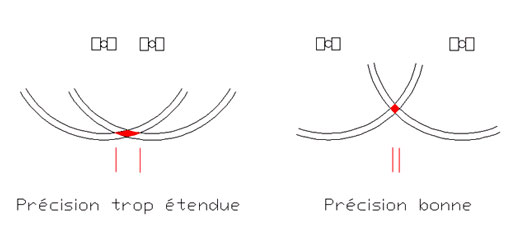
Dans le second cas, le calcul sur l'intersection des sphères donnera un résultat de position plus précis que dans le premier cas.









 piégée par un laser. Les mesures réalisées confirment des prédictions issues d'un théorème découvert au début des années 1990. © J. Adam Fenster, université de Rochester")




