 surmontée d’un robot anthropomorphe (EGP-Robot). Crédit Thales Alenia Space")
 surmontée d’un robot anthropomorphe (EGP-Robot). Crédit Thales Alenia Space")
Il s'appelle Eurobot, ou plus précisément EGP (Eurobot Ground Prototype). Cet assistant robotiquerobotique de surface repose sur un concept baptisé centaure qui consiste en une plate-forme mobilemobile (EGP-Rover) surmontée d'un robotrobot anthropomorphe (EGP-Robot), pourvu de deux bras articulés dotés de capteurscapteurs de force ainsi que de systèmes de vision. L'ensemble ainsi constitué est autonome et capable de se déplacer seul à la surface de la Lune ou de Mars, ou encore le long de l'ISSISS.
En l'état, ce prototype ne fonctionnera peut-être jamais ailleurs que sur Terre. Mais il prépare le terrain pour la génération suivante, celle qui sera envoyée sur d'autres planètes pour rechercher des traces de vie, voire rapporter des échantillons sur Terre. A plus long terme, il pourrait assister efficacement les astronautes sur place pour les débarrasser des tâches les plus lourdes et les plus contraignantes comme s'apprête à le faire dans la Station spatialeStation spatiale Robonaut-2.
Ce centaure s'appuie sur les avancées permises par Eurobot, un programme de l'Esa qui visait à mettre au point un robot capable de se déplacer de se déplacer sur toute la surface extérieure de la Station en s'agrippant à des mains courantes. EGP a pu démontrer des capacités de déplacement et de travail qui diffèrent totalement de ce que sont capables de faire les bras robotiques de la Station.
. Des plongeurs ont simulé une sortie extravéhiculaire. Le robot était chargé d'accompagner et d'assister le plongeur en assurant la manipulation d'une boîte à outils. © Esa / H. Rub")
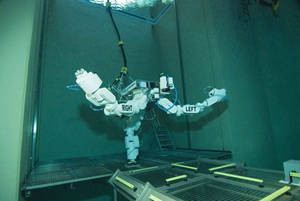
Essai d’Eurobot dans la piscine du Centre des astronautes européens de Cologne en Allemagne (2007). Des plongeurs ont simulé une sortie extravéhiculaire. Le robot était chargé d'accompagner et d'assister le plongeur en assurant la manipulation d'une boîte à outils. © Esa / H. Rub
Un prototype qui a déjà fait ses preuves
Conçu pour être exploité à la surface d'une planète, pour préparer l'atterrissage des astronautes puis pour soutenir leurs activités après leur débarquement, il a mené à bien avec succès deux missions. La première consistait en la préparation d'un site lunaire pour recevoir des astronautes et la seconde comportait des opérations de soutien aux astronautes déjà présents sur la planète qui ont utilisé le robot pour achever la préparation du site.
En matière de robotique, l'Europe a acquis une certaine compétence qu'elle n'a pour l'instant pas réussi à démontrer dans l'espace. EGP, Eurobot et Era, (le bras européen qui sera lancé en 2011 pour être installé sur la partie russe de la Station) montrent ses avancées dans ce domaine.
S'il est indéniable qu'industriels et agences spatiales doivent se concerter pour investir dans la collaboration entre astronautes et robots en préparation de l'exploration spatiale, il faut garder à l'esprit que les programmes actuels laissent à penser que ce type de besoin demeure un objectif lointain. A très court terme, c'est sur les sondes automatiques, pas celles de la télédétection mais les atterrisseurs et les rovers, qu'on a le plus besoin de robots. En comparaison, les vols habitésvols habités font relativement peu appel à l'intelligence artificielleintelligence artificielle et aux robots, les astronautes étant censés fournir leur irremplaçable matière grise. Ils ont juste besoin de systèmes démultiplicateurs d'efforts.
Ces programmes ambitieux ne doivent pas faire oublier que l'Europe travaille également à automatiser des tâches aussi complexes que celles liées à la recherche de la vie extraterrestre et le retour d'échantillons.

par Rémy Decourt
Publié le 5 mai 2010 à 12:18
Comparatifs et bons plans

Conso
Guides entretien des sols
Quels sont les meilleurs aspirateurs pas chers pour voiture ?

Conso
Guides piscine et spa
Beatbot AquaSense 2 : trois robots piscine révolutionnaires et déjà en promo !

Conso
Guides jardin
Cdiscount broie le prix de cet outil multifonctions 3 en 1 Bosch parfait pour entretenir votre jardin

Conso
Guides PC et tablettes
Programme Fiabilité MEDION et ERAZER : une garantie d'un ordinateur réparé et remboursé à 100 % !

Conso
Guides entretien des sols
Quels sont les meilleurs aspirateurs légers en 2025 ?

Conso
Guides entretien des sols
Cet aspirateur balai sans fil Ultenic est affiché à moins de 120 € sur Cdiscount

Maison
station météo
stations météo - nos gagnants 2024

Tech
Renault Espace
Les Renault Espace en test 2024

Maison
panneau solaire










")



 du 24 au 26 octobre 2017. © Rémy Decourt")


, Nasa")




")
