

Si la robotique molle est actuellement en plein essor, un nouveau de champ de recherche vient de s’ouvrir, celui de la Paléobionique. Des chercheurs viennent en effet de produire une réplique robot d’un organisme ayant vécu il y a 450 millions d’années !
au sommaire
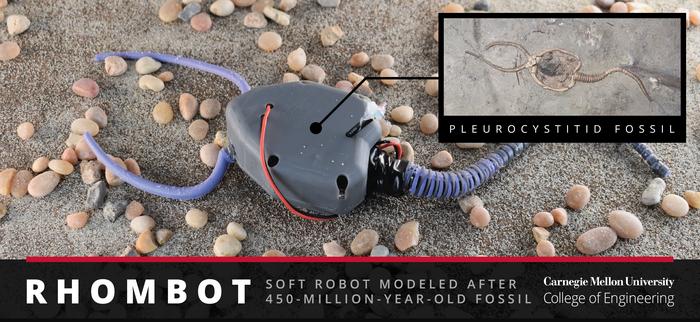
S'il fallait une image de la réincarnation moderne d'organismes d'un lointain passé, c'est certainement celle-là : des chercheurs ont reproduit un pleurocystitide, un petit organisme qui habitait les mers de l’Ordovicien, il y a 450 millions d'années. Cette réplique n'a cependant rien de biologique ! Il s'agit d’un petit robot « mou » composé de matériaux souples et déformables.
Comprendre l’évolution biomécanique des êtres vivants grâce aux robots mous
La robotique molle est actuellement en plein essor et trouve de nombreuses applicationsapplications dans le domaine médical notamment. Mais pourquoi se lancer dans la reproduction d'un organisme disparu il y a une éternité ?
Pour comprendre l'intérêt de l'étude, publiée dans la revue PNAS, il faut savoir que le pleurocystitide n'est pas n'importe quel organisme fossile. Il s'agirait du tout premier échinoderme (invertébré marin de la famille des étoilesétoiles de mer et des oursins) capable de se mouvoir grâce à un système musculaire. Le robotrobot mou conçu sur la base de donnéesbase de données paléontologiques pourrait permettre de comprendre les facteurs biomécaniques qui ont participé à l'évolution des êtres vivants. La constructionconstruction de telles analogues robotiquesrobotiques devrait alors faciliter l'étude notamment de la transformation progressive de la locomotion au cours du temps.

Les débuts de la paléobionique
Une première qui ouvre d'ailleurs la voie à un nouveau champ d'étude, la paléobionique. Les résultats révèlent ainsi que les pleurocystitides étaient certainement capables de se mouvoir sur le fond marin au moyen d'un long muscle propulsant l'animal vers l'avant. Une particularité physiologique qui semble avoir représenté un tournant important dans l'évolution des échinodermes. En analysant les mouvementsmouvements du robot, les scientifiques ont pu déduire que les mouvements de balayage larges étaient certainement les plus efficaces.















, Nasa")


 rappelle que grâce à des preuves d’amour, les animaux peuvent surmonter les épreuves de la vie. © Bojan, Adobe Stock")





