

au sommaire
Voilà quelque temps déjà que la robotique a récupéré à son profit la technique ancestrale de l'origami. Nous avons pu découvrir plusieurs exemples s'inspirant de cette méthode de pliage associée à des alliagesalliages de matériaux à mémoire de formemémoire de forme : des robots transformables, des drones miniatures ou encore un mini robot origami qui se plie, nage, porteporte des charges avant de s'autodétruire (voir la vidéo ci-dessus). À l'École polytechnique fédérale de Lausanne (EPFL, Suisse), les chercheurs du laboratoire de robotique reconfigurable les appellent les « robogamis ». Leur dernière création, nommée Tribot, est présentée cette semaine à l'IROS (International Conference on Intelligent Robots and Systems), une conférence dédiée à la robotique qui se tient à Hambourg (Allemagne).
« Ce robot atypique peut sauter jusqu'à 7 fois sa hauteur, et il n'a pas besoin d'être réinitialisé entre les sauts », explique Jamie Paik, chercheuse à l'EPFL, à propos de Tribot. Ce robot a une forme en « TT » avec trois extrémités. Il mesure environ deux centimètres de haut et pèse à peine quatre grammes. Son mode de déplacement est inspiré de celui de la chenille. Il rampe mais il a aussi la capacité de sauter pour franchir un obstacle. Tout comme les autres robots origami dont nous avons déjà parlé dans ces colonnes, le Tribot est conçu à l'aide d'un alliage à mémoire de forme, en l'occurrence un mélange de titanetitane et de nickelnickel utilisé pour les différentes parties articulées ainsi que les ressorts qui déclenchent le saut.

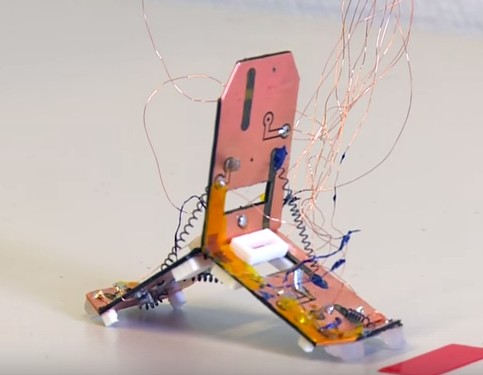
Le Tribot est un robot origami qui se déplace en rampant et peut sauter grâce à ses actionneurs faits dans un alliage à mémoire de forme. © EPFL, YouTube
Un alliage de titane et de nickel qui réagit à la température
L'alliage réagit à la température. Pour que le Tribot se déplace, les actionneurs à mémoire de forme sont chauffés à tour de rôle afin de provoquer un mouvementmouvement de reptation. La même opération appliquée aux ressorts permet au mini robot de sauter. L'EPFL a également développé un autre robogami qui ressemble un peu à une étoileétoile dont les quatre branches s'actionnent alternativement pour lui permettre de ramper. Le chauffage des actionneurs se fait par des impulsions électriques diffusées par des fils ou des microchauffages sans fil directement intégrés dans le robot. Les chercheurs estiment que « ces robots feraient de bons candidats pour se déplacer sur des terrains accidentés ». Certes, mais pour quoi faire ?
Le mode de locomotion est pertinent, dans certaines conditions, mais pas très rapide. De plus, le procédé repose sur l'extrême légèreté du robot qui ne pourrait donc pas servir à transporter des charges. En revanche, équipé de microcaméras, de modules de communication sans fil et d'autres capteurscapteurs, les robogamis pourraient se coordonner entre eux et aller explorer des recoins inaccessibles. C'est précisément ce à quoi l'équipe de l'EPFL compte travailler désormais.








")















