


Schéma de principe d'un nanorobot équipé d'un moteur Proteus et de deux flagelles pour la propulsion. © J. Friends
Pour l'instant, le nanochirurgien capable de se glisser dans une artère n'existe pas encore. Mais une équipe australienne de la Monash University, dirigée par James Friend, vient de décrire un prototype dans la revue Journal of Micromechanics and Microengeenering.
Ce minuscule appareil comprend une tige hélicoïdale de 250 micronsmicrons de diamètre, soit un quart de millimètre, qui peut être mise en rotation à l'aide d'un courant très faible. Appelée stator, elle se met à tourner sous l'effet d'un élément piézo-électrique. Couramment utilisé, un tel matériaumatériau - un cristal - a la propriété d'entrer en vibrationvibration sous l'effet d'un courant électriquecourant électrique, ou, à l'inverse de générer un courant au moindre choc. Les allume-gazgaz sont un exemple d'applicationsapplications, ainsi que les moteurs des montres électroniques et les têtes de lecture de certains tourne-disques pas trop antiques.
. La tige rainurée hélicoïdalement est le stator et mesure un peu plus de 1 millimètre de hauteur pour 250 microns de diamètre. Il peut tourner sur lui-même et porte une sphère visualisant la rotation. L'ensemble repose sur l'élément piézo-électrique (de couleur grise). © J. Friends <em>et al.</em>")
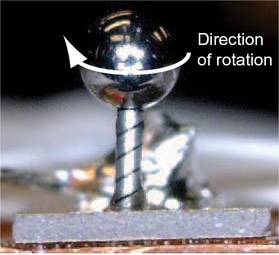
Le prototype vu de près (cliquer sur l'image pour l'agrandir). La tige rainurée hélicoïdalement est le stator et mesure un peu plus de 1 millimètre de hauteur pour 250 microns de diamètre. Il peut tourner sur lui-même et porte une sphère visualisant la rotation. L'ensemble repose sur l'élément piézo-électrique (de couleur grise). © J. Friends et al.
La rotation de ce stator est transmise à un élément nommé rotor, une simple sphère sur le prototype réalisé pour valider le concept. Mais elle pourrait être remplacée par un système propulsif. Sur ses pages Web, James Friends montre un schéma (photo du bas de cet article), où le petit engin est muni de deux flagelles.
Fantastique voyage
Le prototype a permis de démontrer la faisabilité d'un tel moteur dans les dimensions requises pour une insertion dans une artère. Car, dans la longue lignée de l'assistance robotisée à la chirurgie, c'est bien la destinée de cet appareil. Ses concepteurs l'ont d'ailleurs baptisé ProteusProteus, du nom du sous-marinsous-marin microscopique imaginé par Isaac AsimovIsaac Asimov dans sa nouvelle Le voyage fantastique, reprise au cinéma dans un film au même titre. On y voit un équipage humain mais miniaturisé lui aussi et introduit avec le submersible dans le corps d'un homme pour aller détruire un caillot de sangcaillot de sang à l'intérieur du cerveau.
Une telle mission pourrait un jour être confiée à un engin comme ce Proteus. Avec une rotation de 1.295 tours par minute, ce robotrobot miniature pourrait, affirment les chercheurs, remonter le courant du flux sanguin si celui-ci n'est pas trop puissant, par exemple au niveau du cerveau, mais pas près du cœur où l'engin serait emporté.
Pour l'instant, l'appareil n'a aucune source d'énergieénergie mais il pourrait être alimenté par des ondes électromagnétiquesondes électromagnétiques, de l'ordre de 2 à 3 wattswatts. Il resterait ensuite à le doter d'un instrument. Une caméra serait une possibilité mais on peut imaginer n'importe quel capteurcapteur ou des petits systèmes micro-mécaniques (MemsMems, Micro Electromechanical Systems), aujourd'hui très étudiés. C'est la prochaine étape...

par Jean-Luc Goudet
Publié le 23 janvier 2009 à 16:26
Comparatifs et bons plans

Conso
Guides fitness et bien-être
Soldes : le tapis de course Citysports ZX1 est à portée de main sur Cdiscount

Conso
Guides fitness et bien-être
Quels sont les meilleurs tapis de marche à moins de 200 € ?

Conso
Guides fitness et bien-être
Quelles sont les meilleures stations de musculation à moins de 600 € ?

Conso
Guides fitness et bien-être
Fitness à domicile : -240 € sur ce rameur pliable BIGZZIA dont le prix fait sensation !

Conso
Guides fitness et bien-être
Quelles sont les meilleures stations de musculation à moins de 500 € ?

Conso
Guides fitness et bien-être
Quelles sont les meilleures stations de musculation à moins de 400 € ?

Santé
feu arrière de vélo
Les feux arrière de vélo - comparez-les facilement

Santé
raquette de tennis
Nouvelles raquettes de tennis ? Notre choix

Santé
rasoir manuel femme



 ressemble à un transistor (à gauche). La porte (G, Gate) commande le contact entre la source (S) et le drain (D) en pliant la lame vers le condensateur (D). © KAIST")













, d’où partent trois grosses artères : l’artère subclavière gauche, l’artère carotide commune gauche et le tronc brachio-céphalique.© Patrick J. Lynch, CC by-sa 2.5")

")



