

au sommaire
Le Canada est devenu la référence en matière de bras robotiques spatiaux. Il a ainsi réalisé les bras télémanipulateurs Canadarm des navettes, la perche d'inspection OBSS conçue après la perte de ColumbiaColumbia pour inspecter les navettes en orbite et le système d'entretien mobilemobile (MSS), un des éléments essentiels de la Station spatiale internationale. Il est constitué du Canadarm2 (SSRMS, Space Station Remote Manipulator System), de la base mobile (MBS, Mobile Base System) et du « manipulateur agile spécialisé » (SPDM, Special Purpose Dexterous Manipulator), plus communément appelé Dextre.
À l'avenir, le Canada souhaite conserver sa place de leader dans cette spécialité, appelée à jouer un rôle grandissant dans l'exploration et l’utilisation de l’espace. Comme l'explique à Futura-Sciences Gilles Leclerc, directeur général de l'exploration spatiale à l'Agence spatiale canadienneAgence spatiale canadienne, « Peu importe les destinations que choisira la communauté spatiale internationale, elle devra avoir recours à la robotiquerobotique spatiale pour accomplir diverses missions, qu'il s'agisse de rovers jouant le rôle d'explorateurs planétaires ou de robotsrobots conçus pour réparer et ravitailler les satellites et les télescopes spatiaux ». D'où l'initiative canadienne de préparer une nouvelle génération de bras robotiques à travers le programme Nouvelle génération de Canadarm (NGCNGC) initié en 2009. Aujourd'hui, il aboutit à « quatre prototypes robotiques et une station d'exploitation de mission, dont deux bras, que nous venons de présenter ».
. Il servira à simuler le déploiement du bras au cours de tâches exigeantes comme la capture et l’amarrage de gros satellites à des fins de ravitaillement. © Agence spatiale canadienne")
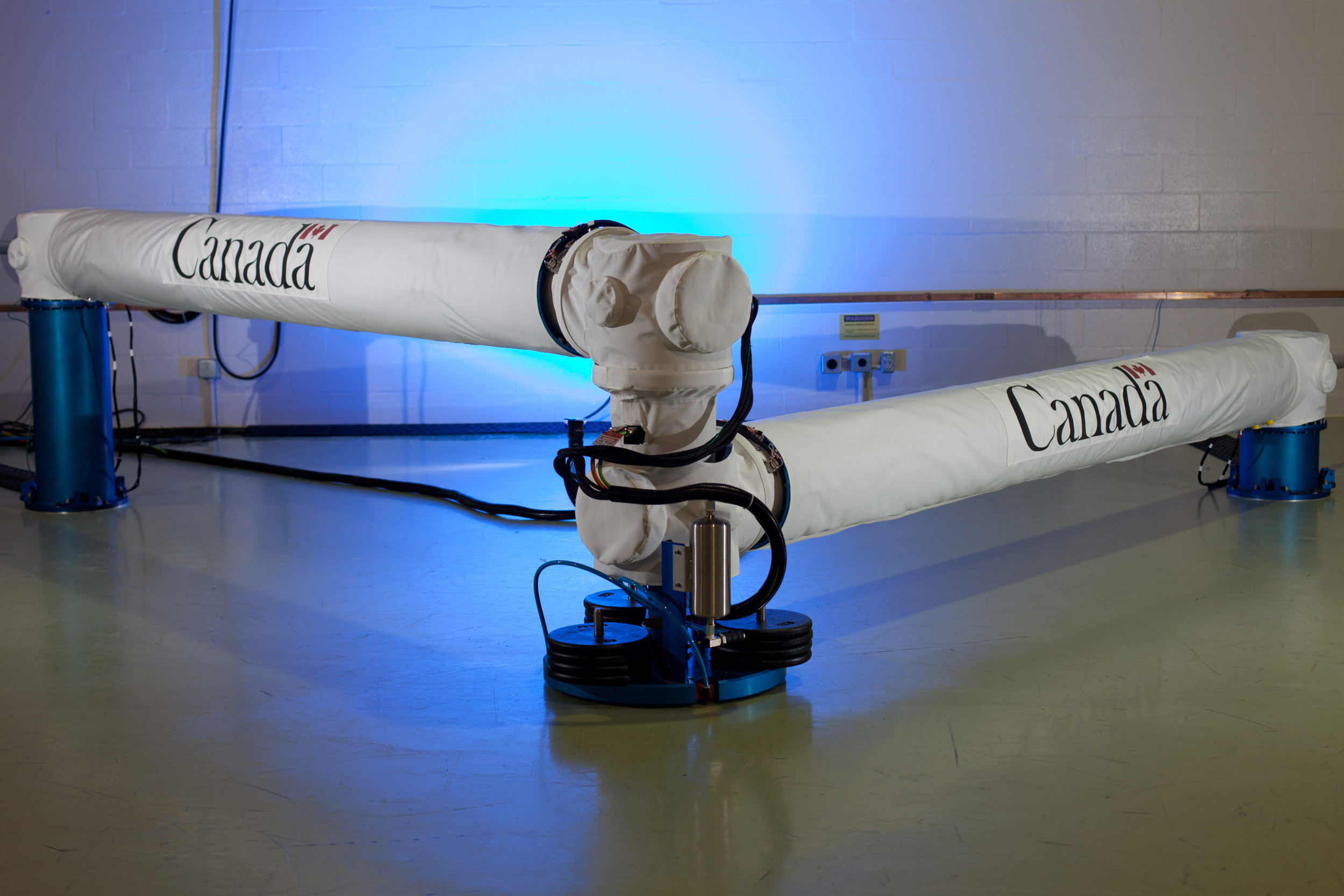
Prototype de bras robotique de même portée de 15 m que le Canadarm2 mais bien plus compact et allégé. Il est destiné aux engins spatiaux plus petits du futur. Conçu pour fonctionner comme banc d’essai sur Terre, le grand Canadarm de nouvelle génération repose sur des coussins d’air qui lui donnent une grande liberté de mouvement (six degrés de liberté). Il servira à simuler le déploiement du bras au cours de tâches exigeantes comme la capture et l’amarrage de gros satellites à des fins de ravitaillement. © Agence spatiale canadienne
Le saut technologique des bras robotiques canadiens
L'idée a été de « s'appuyer sur l'expérience acquise » lors de l'utilisation des bras à bord des navettes et de la Station spatiale. « Nous avons gagné beaucoup d'expérience sur leur fonctionnement. Aujourd'hui, ces bras sont capables de faire des choses que l'on ne soupçonnait pas au moment de leur conception. Ils réalisent des tâches additionnelles qui limitent d'autant les sorties dans l'espace. »
Ces prototypes représentent un « saut technologique significatif » par rapport à la génération actuelle dont les matériaux et les développements datent de la fin des années 1970 et du début des années 1980. L'idée était de s'appuyer sur « le matériel existant et de devancer la technologie existante ».
Un bras robotique de 15 m, qui peut être contenu dans un espace dont le volumevolume est comparable à celui d'une minifourgonnette (c'est-à-dire qu'il est télescopique), peut être installé à bord de « n'importe quel futur engin spatial dont l'Orion MPCV de la NasaNasa ». L'autre bras est plus petit. D'une longueur de 2,5 m, il est doté de sa propre trousse d'outils perfectionnés capables de réparer des satellites en orbite, les ravitailler ou de remplacer des éléments. Pour ce bras qui s'inspire de Dextre, trois demandes de brevets ont été déposées pour des technologies clés liées au « ravitaillement et à la réparation de satellites en orbite ».

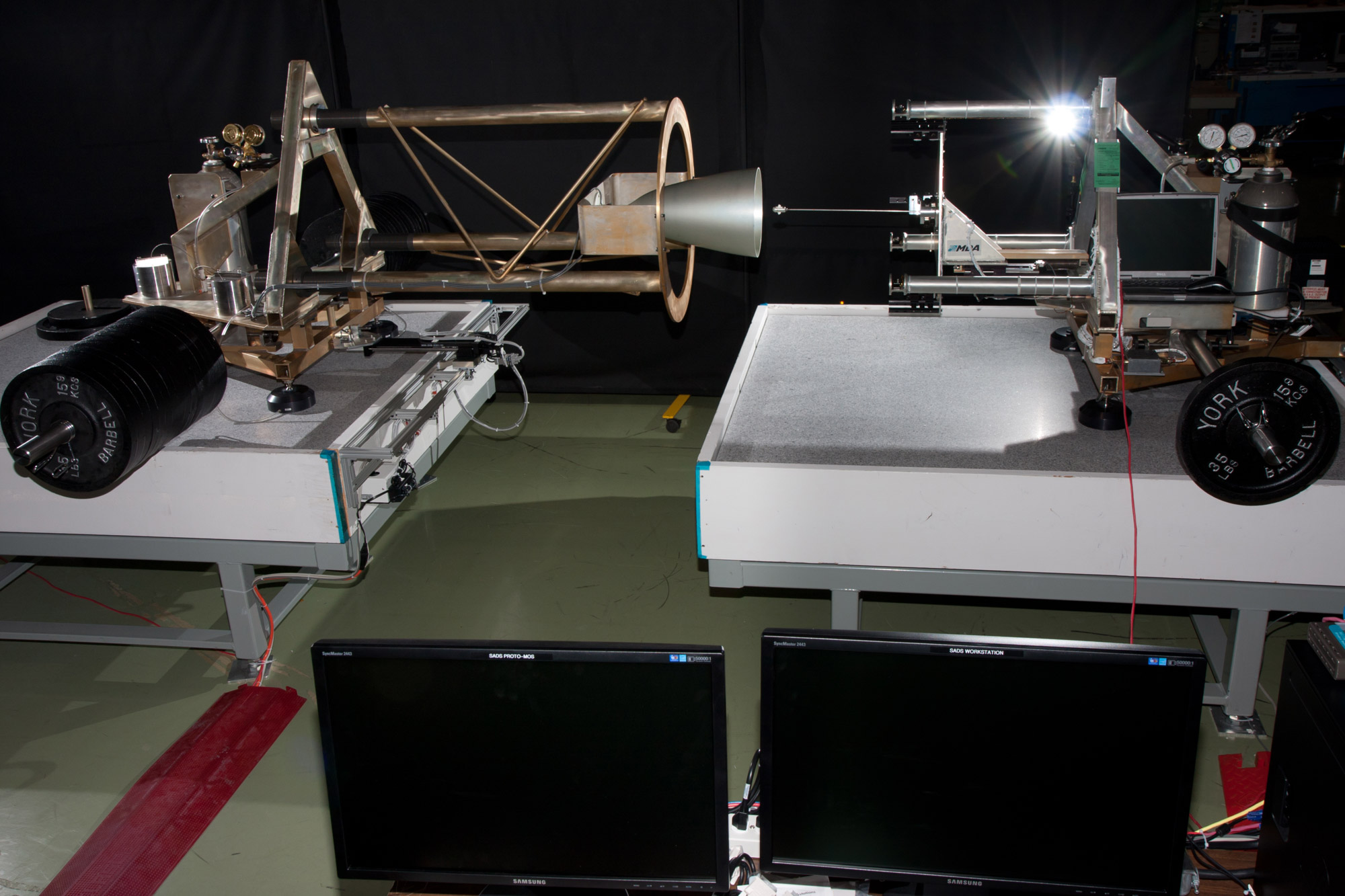
Système d’amarrage semi-automatique conçu pour tester l'amarrage de deux engins, du contact initial jusqu’aux étapes finales de verrouillage des deux engins spatiaux l’un à l’autre. Il est conçu pour évaluer les interactions et le fonctionnement des capteurs à l’amarrage. © Agence spatiale canadienne
Des prototypes pour les futures missions d'exploration
Ces bras spatiaux du futur ne seront toutefois pas utilisés sur la Station spatiale internationale, qui en a déjà dont le fonctionnement est prévu jusqu'en 2015 et suffisants en nombre. Actuellement, la Station en compte deux. Un troisième, celui de l'Agence spatiale européenneAgence spatiale européenne (Esa), est attendu à la fin de 2013. Cependant, il est tout à fait possible d'envisager d'utiliser l'ISS comme un banc d'essais pour démontrer leur capacité à réaliser les tâches auxquelles on les destine, pour l'exploration et l'entretien des satellites par exemple.
Les deux autres prototypes sont également des tests. L'un simule l'approche de deux engins spatiaux à quelques mètres l'un de l'autre et l'autre simule les étapes nécessaires à l'amarrage de deux satellites et une station de contrôle de mission permet de manœuvrer tous les systèmes du NGC à distance.
Ces quatre prototypes couvrent l'ensemble des besoins identifiés en réparation et entretien des futures missions d'exploration et des composants de l'infrastructure spatiale du futur. Surtout, ils sont « développés de façon ouverte de sorte qu'ils peuvent être adaptés à une très grande variété de missions ». Ces prototypes sont là pour être en mesure de se positionner lorsqu'une occasion se présentera. L'idée est de « prendre part au prochain grand projet d'infrastructure qui succédera à la Station spatiale ». De l'orbite lunaire à celle de Mars, des points de Lagrangepoints de Lagrange aux astéroïdes, les « objectifs ne manquent pas ». Les agences spatiales attendent que l'environnement économique devienne plus favorable pour des missions qui se chiffreront en milliards de dollars.



. Ce bras, clairement visible à droite de l'image est installé sur le segment russe de la Station spatiale. © Nasa")













")





, Michael H. Wong (UC Berkeley) ; Traitement d’images : Joseph DePasquale (STScI)")
