au sommaire
L'hybridationhybridation technologique et biologique peut également servir les humains, sous sa forme connue de prothèsesprothèses artificielles.




La start-upstart-up japonaise Cyberdyne conçoit HAL (Hybrid Assistive Limb), une combinaison pour personnes âgées ou handicapées. L'exosqueletteexosquelette robotiquerobotique mesure 1,60 mètre et pèse 23 kilos et peut interpréter les impulsions électriques musculaires enregistrées au niveau de la peau. Il fournit ainsi des supports de jambes et de bras qui augmentent la résistancerésistance et la stabilité de la personne : celle-ci peut alors facilement se lever de son siège, monter des escaliersescaliers et porter jusqu'à 40 kilos. Un Japonais, tétraplégiquetétraplégique depuis vingt ans, a pu grâce à elle réaliser son rêve : escalader le Breithorn en Suisse.


D'autres projets semblables sont étudiés, dont la combinaison Cyberthèse de l'École polytechnique fédérale de Lausanne, qui programme des entraînements moteurs pour personnes handicapées.
Dans la même optique, on peut citer l'exosquelette eLegs, pourvu d'une intelligence artificielle et permettant aux personnes paralysées de marcher.


Des machines contrôlées par l'influx nerveux
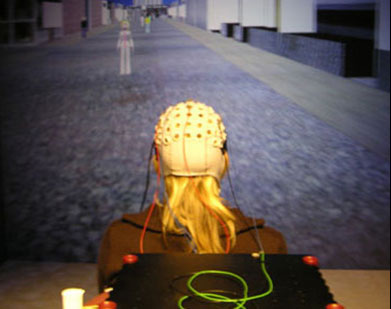
Dans les travaux concernant les « interfaces cerveaucerveau-ordinateurordinateur », c'est l'influx nerveuxinflux nerveux qui maîtrise la machine. Le principe consiste à enregistrer en temps réel, avec des neuroprothèses multiélectrodes, l'activité électrique de populations de neurones sensorielsneurones sensoriels et moteurs, et à traduire les informations correspondantes en ordres moteurs capables d'actionner un ordinateur, une machine ou un robotrobot. Les techniques invasives ou semi-invasives enregistrent les signaux électriques nerveux à l'aide de neuroprothèses implantées sous le crânecrâne. Les techniques non invasives, elles, enregistrent un électroencéphalogrammeélectroencéphalogramme par l'intermédiaire d'un bonnet multiélectrodes.
Un projet européen coordonné par un laboratoire autrichien utilise la réalité virtuelle pour analyser plus précisément les interactions entre le sujet et un environnement en trois dimensions qu'ils peuvent parfaitement contrôler. Un sujet est entraîné à avancer ou à s'arrêter dans une rue bordée de boutiques, en imaginant qu'il exécute un mouvement convenu comme bouger un pied ou une main.